压电陶瓷惯性驱动器为空间节约型且价格不贵的基于压电陶瓷的驱动器,其保持力相对较大,行程几乎是无限的。该类驱动器利用粘-滑效应(惯性效应)–压电陶瓷元件造成的转子和驱动元件之间静摩擦和滑动摩擦的周期性交替–实现转子的连续进给。大于20kHz的工作频率可使转子在速度大于5mm/s时被直接驱动。
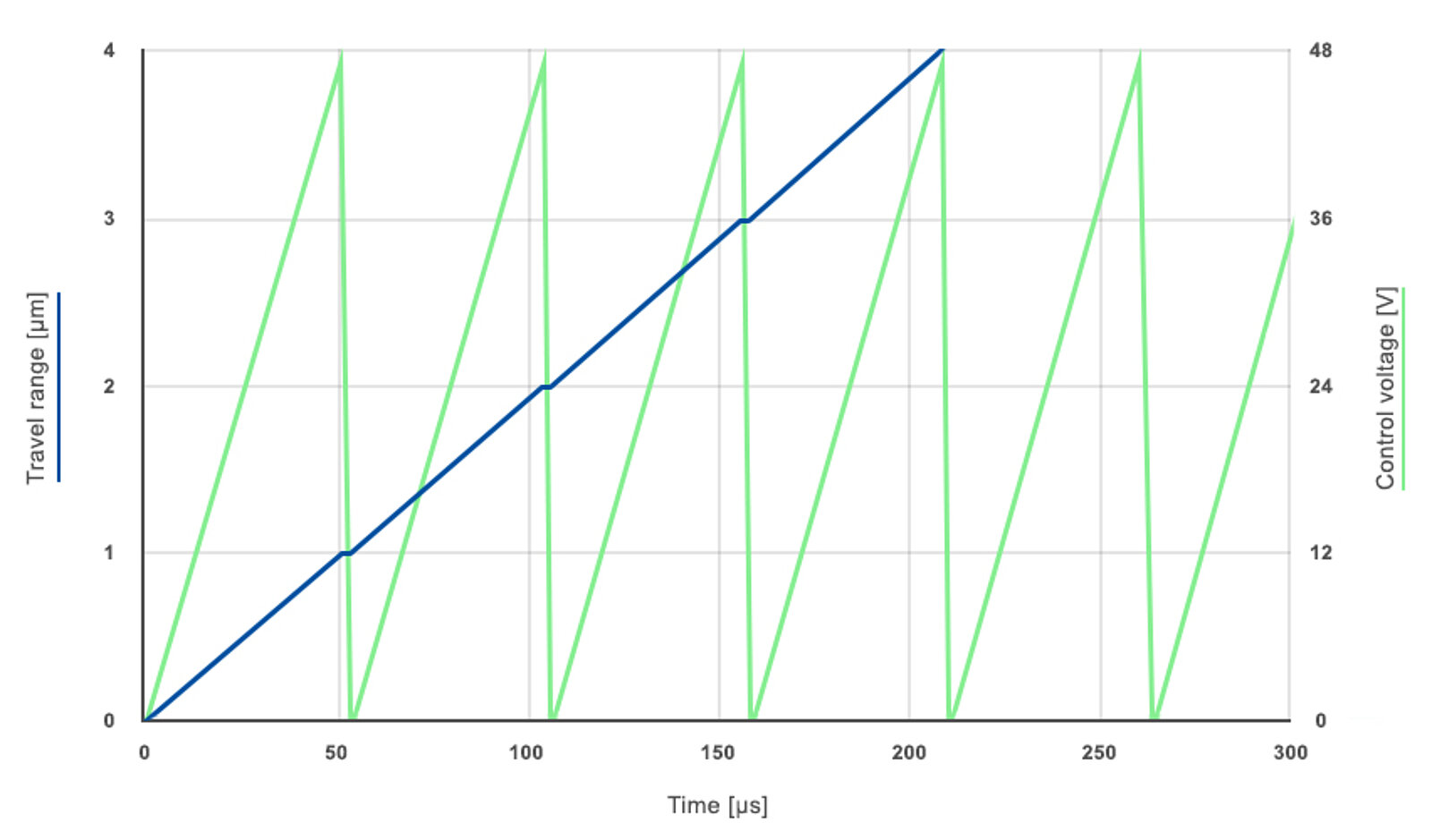
惯性驱动器原理是基于由驱动器电控产生的修正锯齿波电压控制的单个压电促动器。促动器缓慢膨胀,移动转子。由于其惯性,转子无法跟上促动器的快速收缩,停留在其位置上。
转子一侧安装的驱动元件可实现直线或旋转运动以及非常小的平台设计。与合适的增量编码器结合后,可形成宽仅为20mm多一点、高仅为10mm的线性或旋转平台。对于不带传感器的开环操作,尺寸还能更小一些。
与切向驱动器相比,连杆驱动器可使压电陶瓷促动器和转子之间的耦合面更大,从而产生相对更大的达10N的保持力。转子被引导穿过促动器的内孔,使驱动器的设计仍然保持紧凑。连杆驱动器已用于一些产品中,如位置控制的宽45mm的Q-545线性平台或N-412OEM线性促动器。
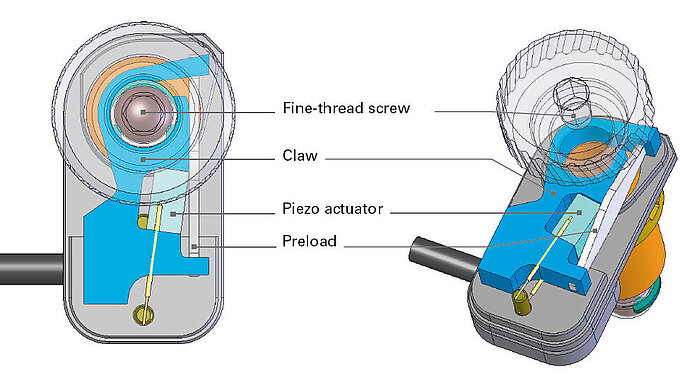
不同于直接驱动,PiezoMike促动器的膨胀导致爪形部件的旋转运动。由于爪形部件夹在细牙螺纹螺杆上,产生的运动将带动螺杆旋转。螺纹的减少使得进给力为>22N时能产生高达>100N的保持力。
紧凑、低成本的惯性驱动器原理(粘-滑)。静止状态下,驱动器自锁,无需电流,不产生热量,能用较大的力保持住位置。
在缓慢控制阶段(黏滞阶段),转子被移动,驱动器如同一个传统的压电陶瓷促动器。通过改变施加的电压,促动器可占据任意位置,从而实现较高的运动分辨率,这也是压电陶瓷的典型特点。 与测量位置的增量编码器结合后,驱动器可实现较高的定位精度和较长行程范围内较高的运动重复性。
在20kHz的最大工作频率下,驱动器工作时静音。不工作时,驱动器自锁,无需电流,不产生热量,能用最大的力保持住位置,因而非常适用于具有低负载周期值的电池供电的移动应用。对于不同类型的驱动器,压电电压也有所不同:对于切向促动器,压电电压低于48V,而对于连杆驱动器,压电电压高达100V。
压电陶瓷惯性驱动器是基于成本效益好的单个促动器解决方案,控制简单,还可实现与现有电路的集成。
通过电子邮件或电话从当地PI销售工程师处快速获取解答。
Selection guide for the best solution
Lifetime, Vacuum Applications, Wear