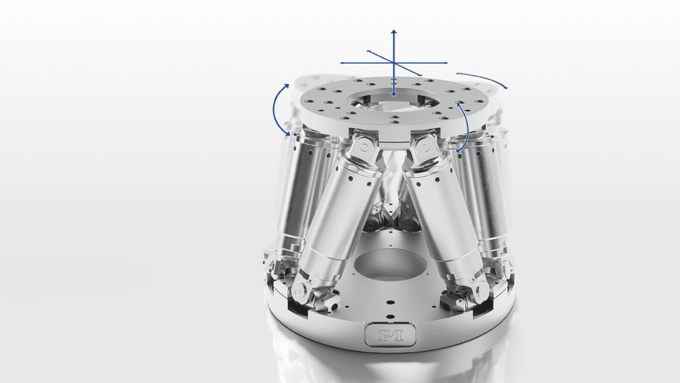
借助功能强大、操作直观的控制器和软件,可轻松控制六足位移台。 用户可定义的旋转中心还提供了充分的应用灵活性。
PI的六足位移台有不同的尺寸和配置可供选择,应用范围广泛,从用于实验中样本定位的六足位移台到光纤和光学元件的主动对准,再到自动化装配。


PI的高精度小型六足位移台在尺寸、有效负载和性能之间实现了完美平衡。 这些超小型六足位移台非常适合微装配中的工具或工件定位、硅光子学中的光纤对准或功能测试中的运动仿真等应用。 此外,还提供低至10-6hPa的真空型号。








PI的中型高精度六足位移台有多种变体可供选择,可满足多样化的应用要求:从用于运动仿真的动态六足位移台,到用于精密对准的具有最高重复精度的系统,再到采用折叠式动力传动系统的六足位移台,这些六足位移台设计紧凑,可定位中等负载。






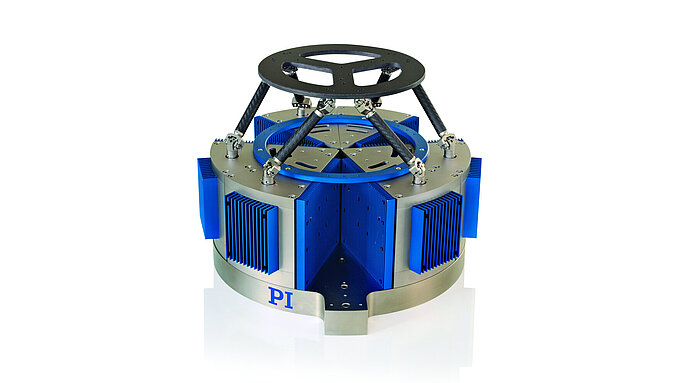
PI的高负载六足位移台可安全、准确地定位重型负载,而不受方向或安装情况的影响。 这得益于带有Z偏移的特殊万向节以及其他无间隙、刚性的组件。 可应用的范围很广,从移动重型元件和光学器件,到定位工业和研究领域的检验工具,再到对准望远镜中的反射镜。



PI在真空技术和高度垂直整合方面拥有多年经验。 因此,PI能够提供符合真空应用要求的标准和定制六足位移台:涵盖从设计、驱动组件、材料和配件选择,到制造工艺和质量控制的各个方面。
标准六足位移台可用于高达10-6hPa的真空环境。 定制的六足位移台甚至可以设计用于更高的真空等级。



控制器、软件和集成
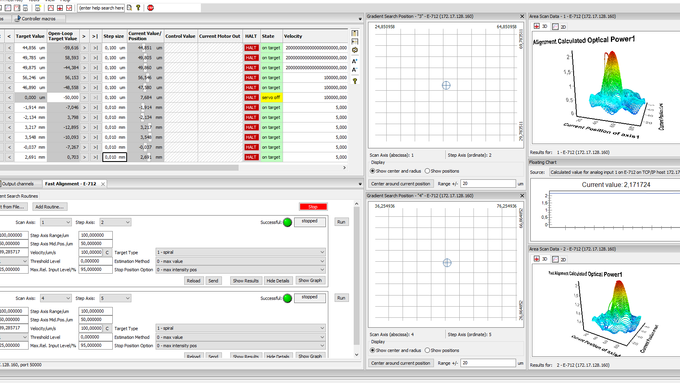
六足位移台控制器可对并联运动6自由度系统进行简单直观的控制: 所有目标位置均可在直角坐标系中进行控制。 控制器通过使用计算来控制各个支撑腿,从而实现平台的预期运动。
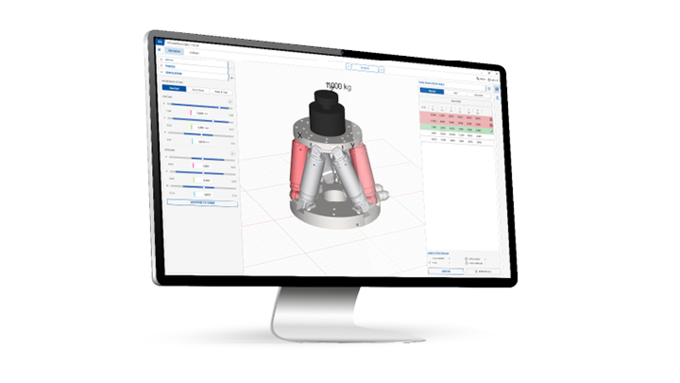
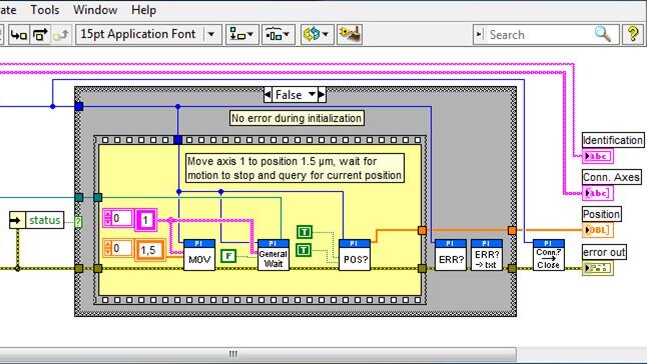
参考坐标系和旋转中心的位置和对准可在软件中轻松定义,并根据应用进行调整。 PI的通用GUI不仅可用于控制和启动所有六足位移台系统,还可用于控制和启动采用任何驱动技术的所有其他PI定位系统。 PI软件套件是一个综合软件包,还为许多常用编程语言提供驱动程序和库。
模拟控制器可在部署六足位移台之前,帮助客户将其集成到编程中。 这样,客户就可以开发、测试和优化用户程序,甚至在收到系统之前就能将六足位移台集成到生产环境中。
并联运动仿真程序可以计算和描述工作区和负载情况,也可用于简化实施。 还可选配工业EtherCAT®接口,以便集成到自动化流程中。