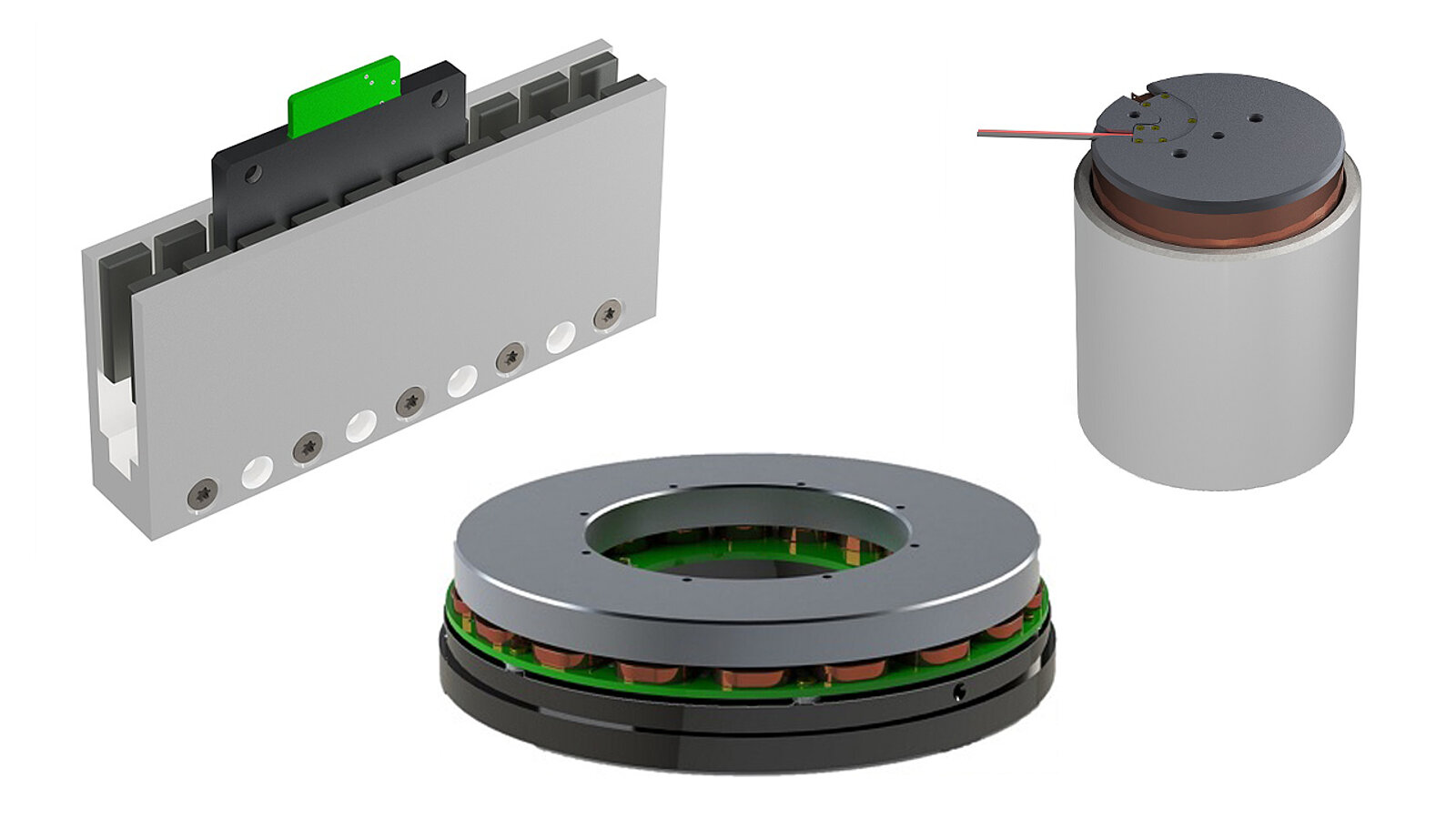
音圈电机、线性电机或力矩电机等驱动器均为电磁直接驱动器。在直接驱动器中,驱动器元件的力直接传递至要移动的负载(例如,传递至无联接器、传动螺杆或减速齿轮等机械传动元件的线性或旋转工作台)。电磁直接驱动器由电流通过时将形成磁场的绕组体(线圈)和安装有磁体的载体或磁性组件组成。
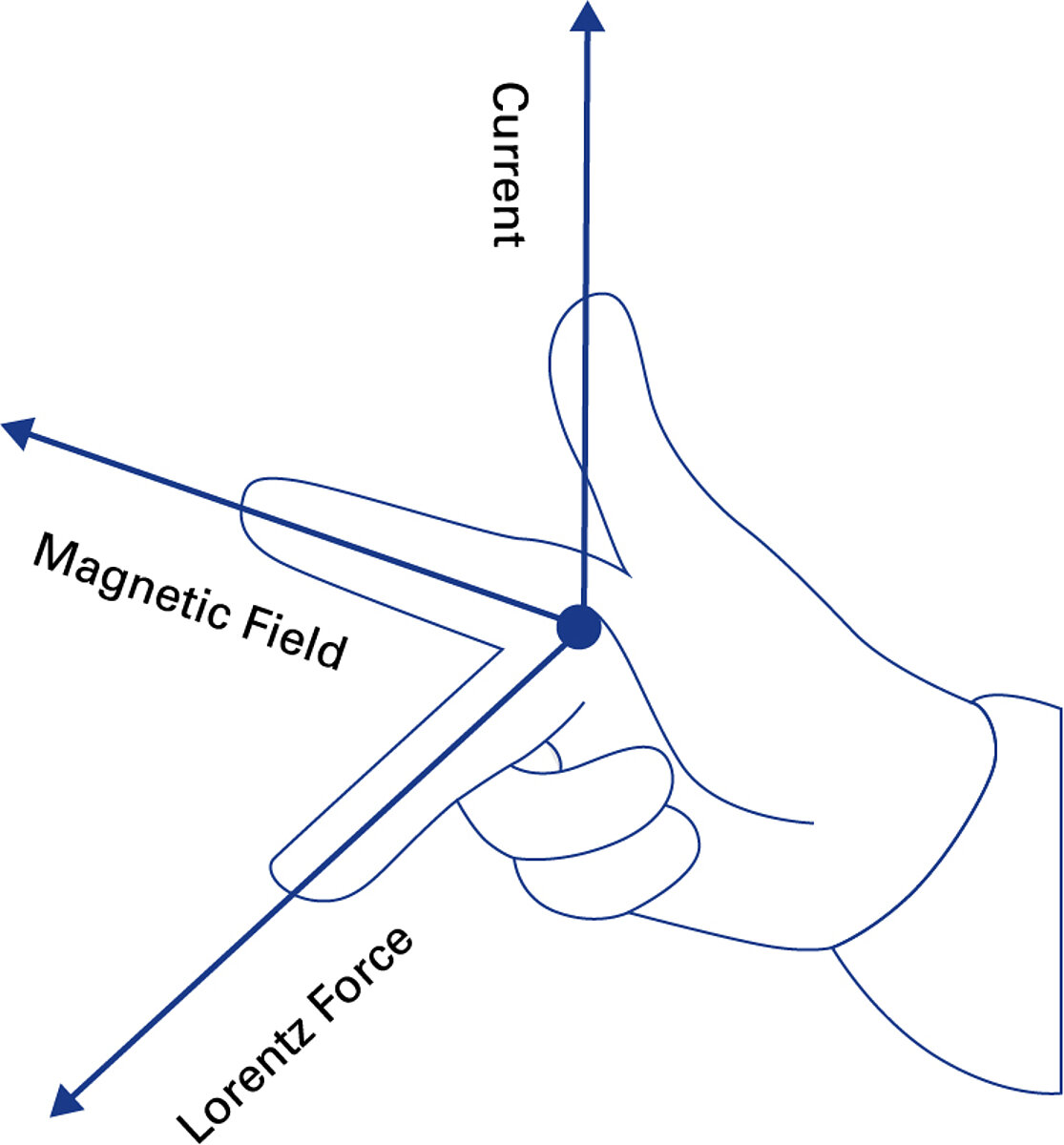
用于加速负载的力或力矩由洛伦兹力生成。该力与磁场强度和通过载流导体的电流成正比。电能在此处转换为机械能。产生的力可根据电流方向双向作用。原则上,可以移动绕组体(“可动线圈”)或磁性组件(“可动磁体”)。可动部件称为从动件,静止部件称为主动件。
PI提供多种配备磁性直接驱动器的标准和客户特定的定位解决方案;公司还在设计、构建和制造必需的系统组件(如导轨、传感器、控制技术和软件)方面有着多年的经验。如果定位系统需要使用市场上现有的驱动组件无法实现的特定性能特性(例如实现高力密度或紧凑设计),则PI还可以开发专有的磁性电机。这些内部开发的专有电机由PIMag品牌名称标识,使用这些PI电机的定位系统由由PIMag驱动徽标标识。
还可以针对力或电机常数优化音圈。电机常数表示力与功率损耗的比率。电机常数越高,生成一定力时产生的热量越少。该常数表示将电能转换为动能的电机效率。随着温度的升高,绕组电阻增加,因此功率损耗也随之而增加,这就是电机常数与温度相关的原因。
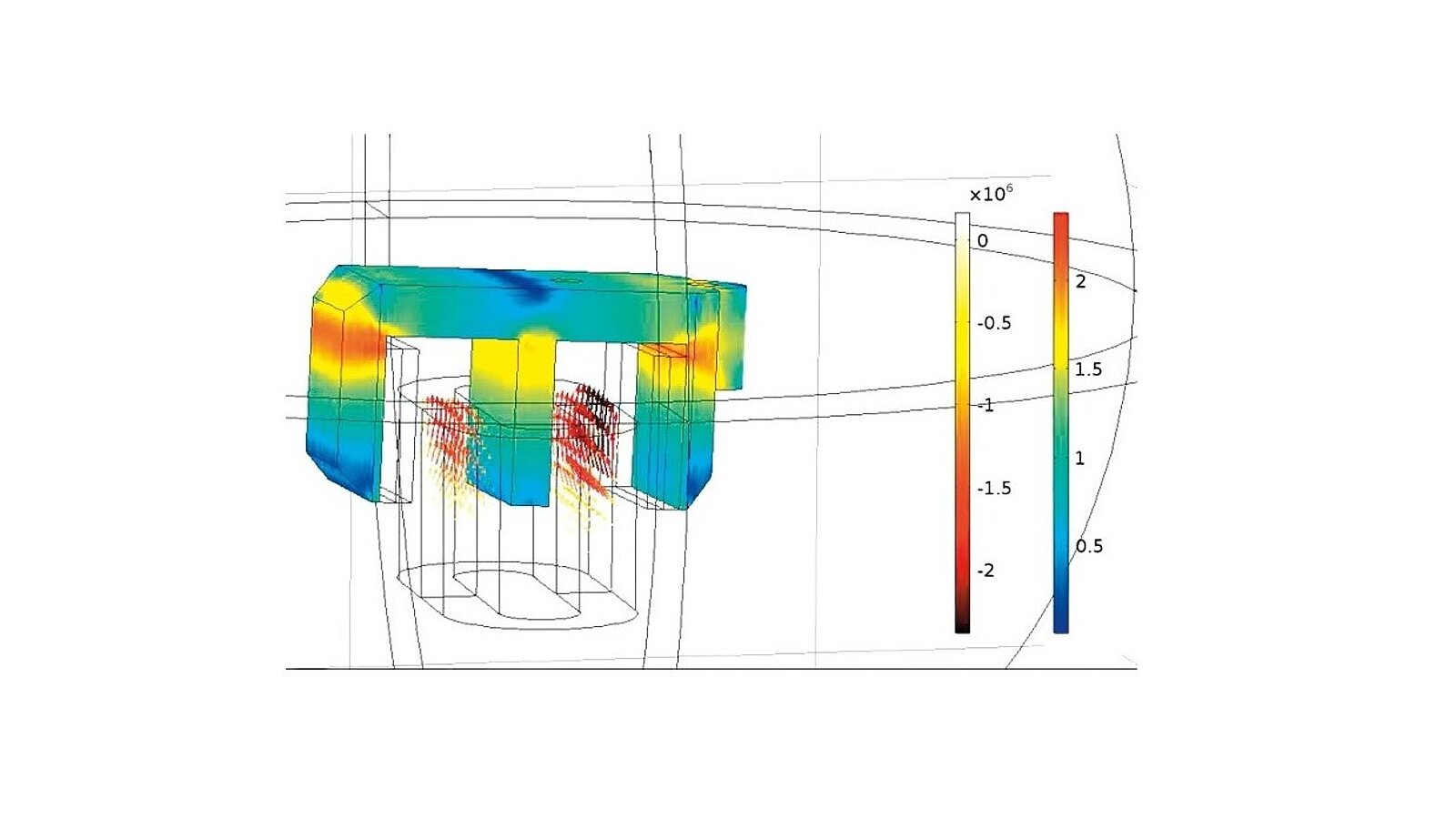
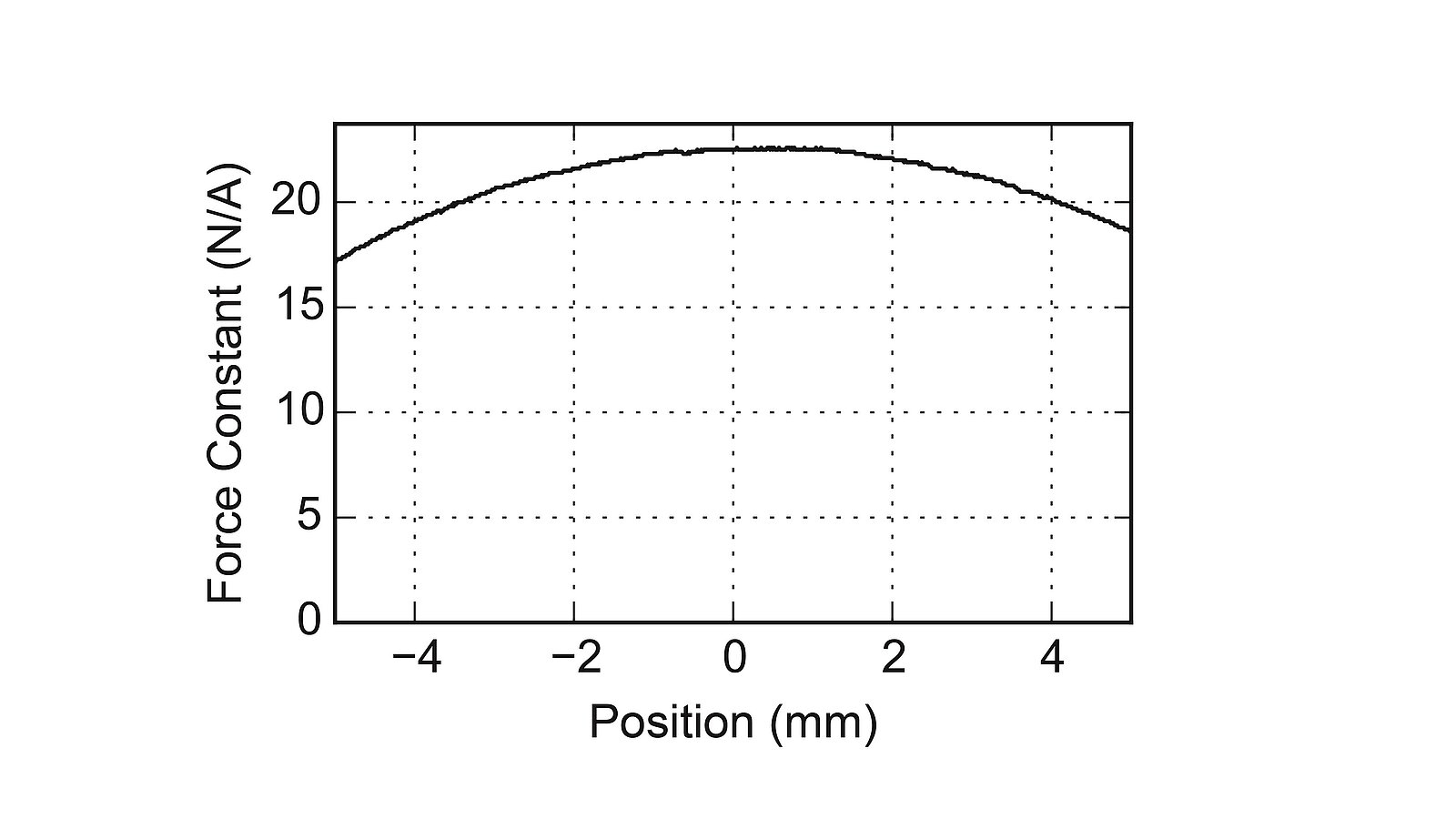
由于线圈沿行程相对于永磁体移动,因此该力取决于位置。为了尽可能快地将力驱动到电机中,可以提高电压,因为然后相应更快地获得电流。加速度以相同的比率增加。因此,通过快速增加加速度(加加速度),可以实现高动态应用。例如,圆柱形电动机用于定位解决方案以进行聚焦任务,以便垂直地或在内窥镜中动态地移动测量头或光学系统。


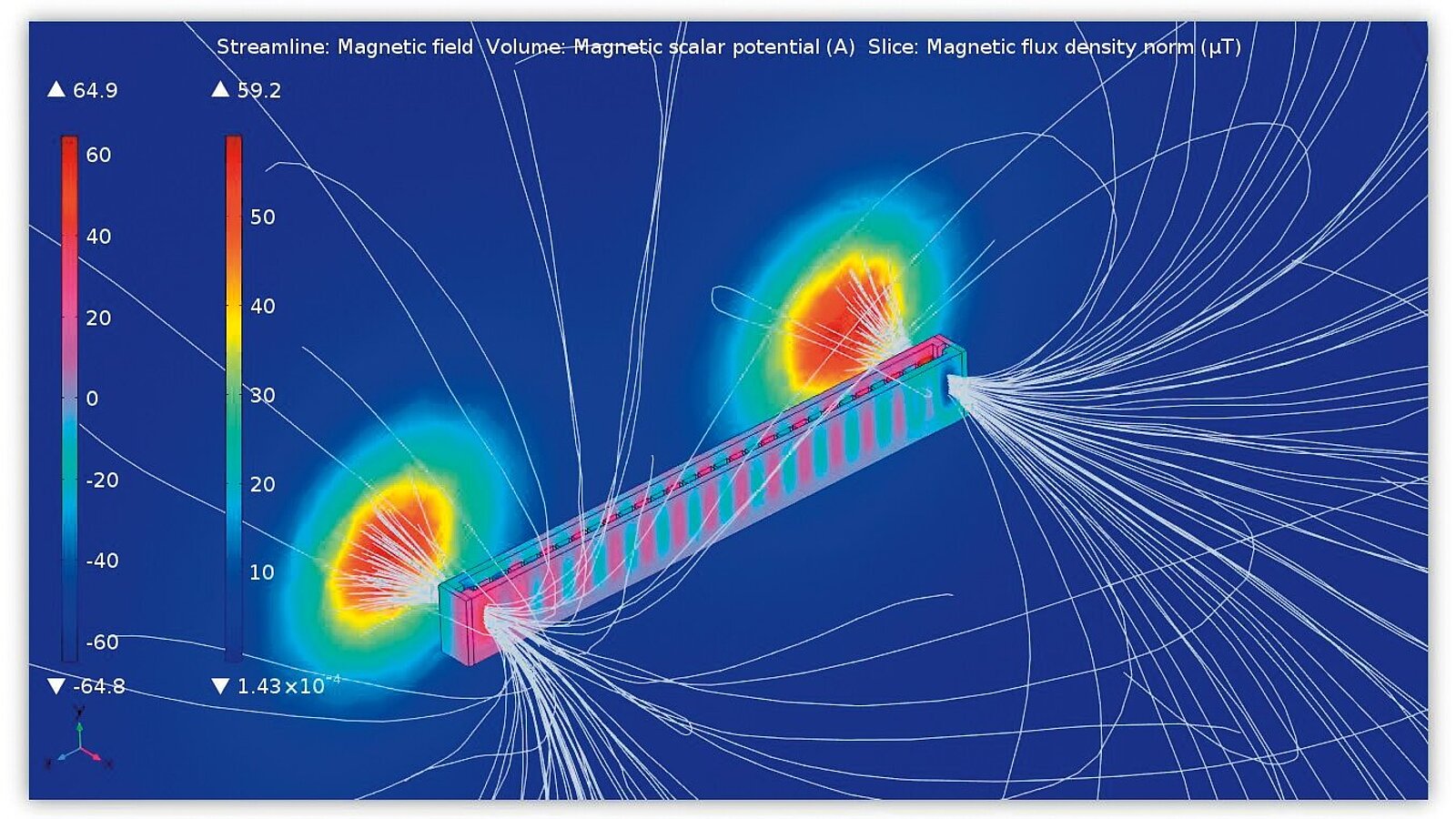

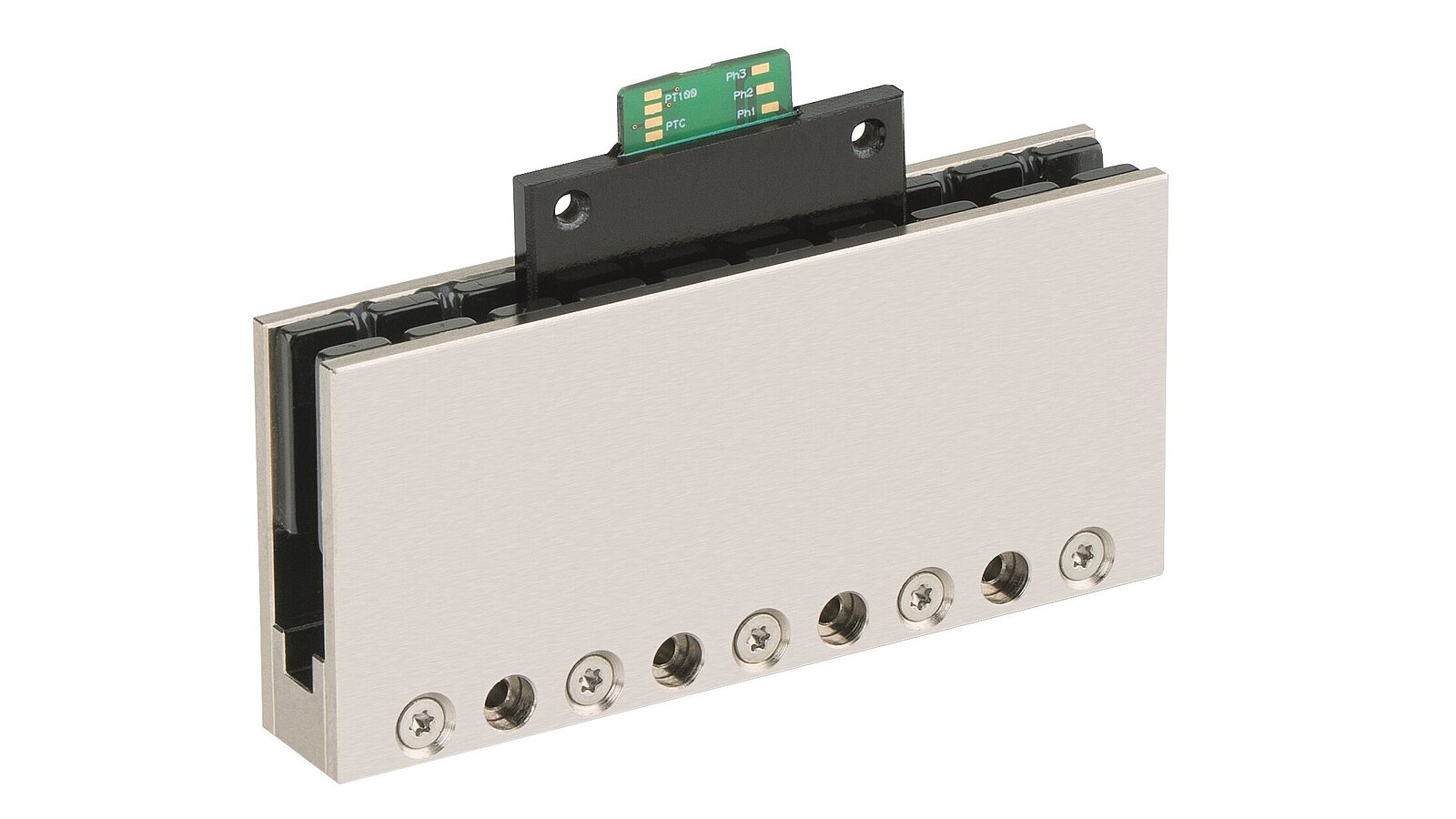
PI线性电机中使用的磁轨有各种长度可供选择,可将其串联连接,以实现任何所需的行程。可提供单边或U形磁轨。
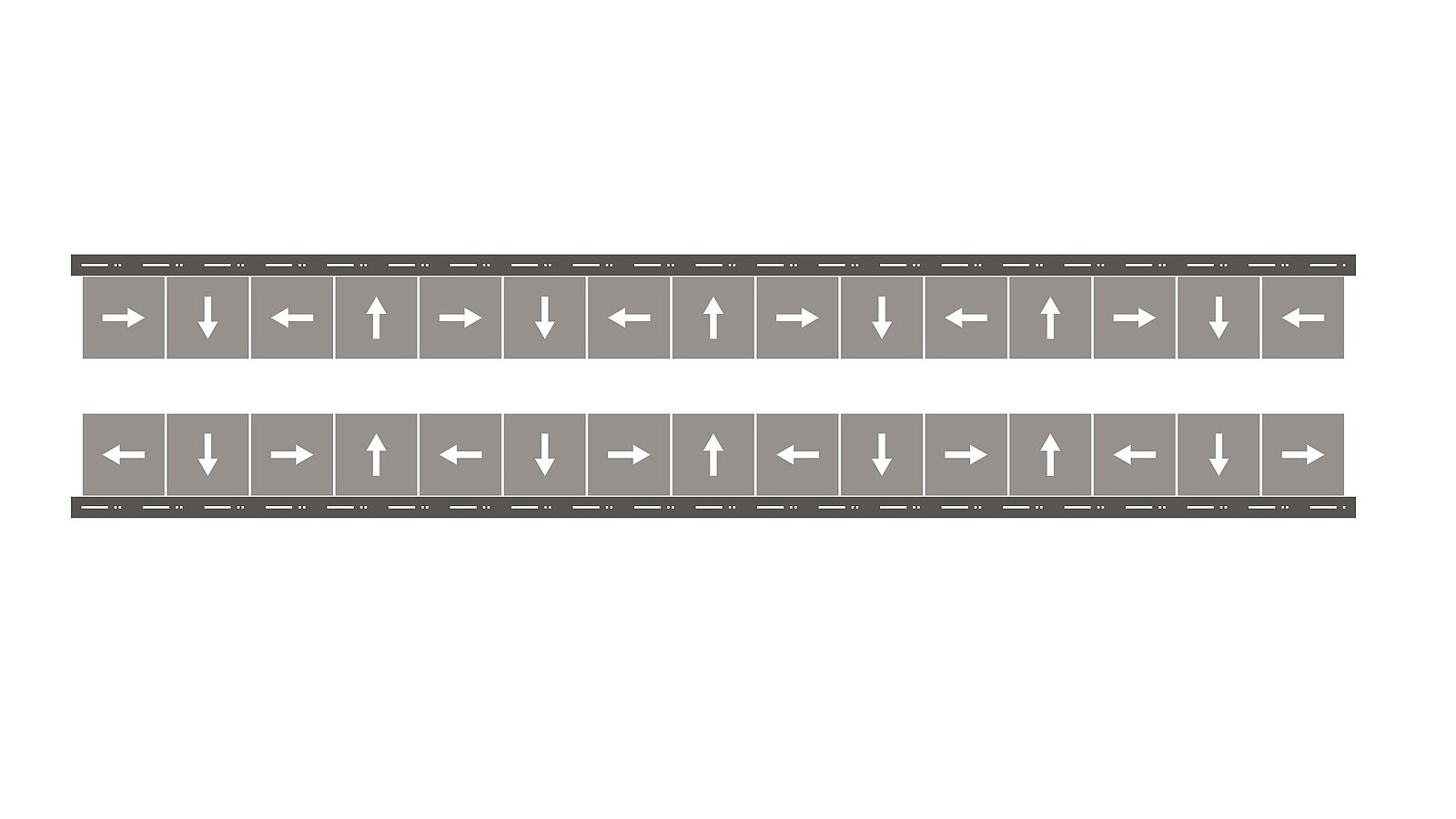
U形磁轨实现了比单边磁轨更高的磁场强度,因此具有更高的力。如果磁体另外排列为Halbach阵列,则与磁北极到磁南极排列相比,磁场强度可以增加约10%。此外,可以在Halbach阵列中省略铁垫片,从而使这些磁轨明显更轻。使用Halbach阵列的优点同样适用于单边磁轨。在这种情况下,使用Halbach阵列可以较大限度地减少后侧的杂散场。PI为需要轻磁轨的应用提供碳载体。
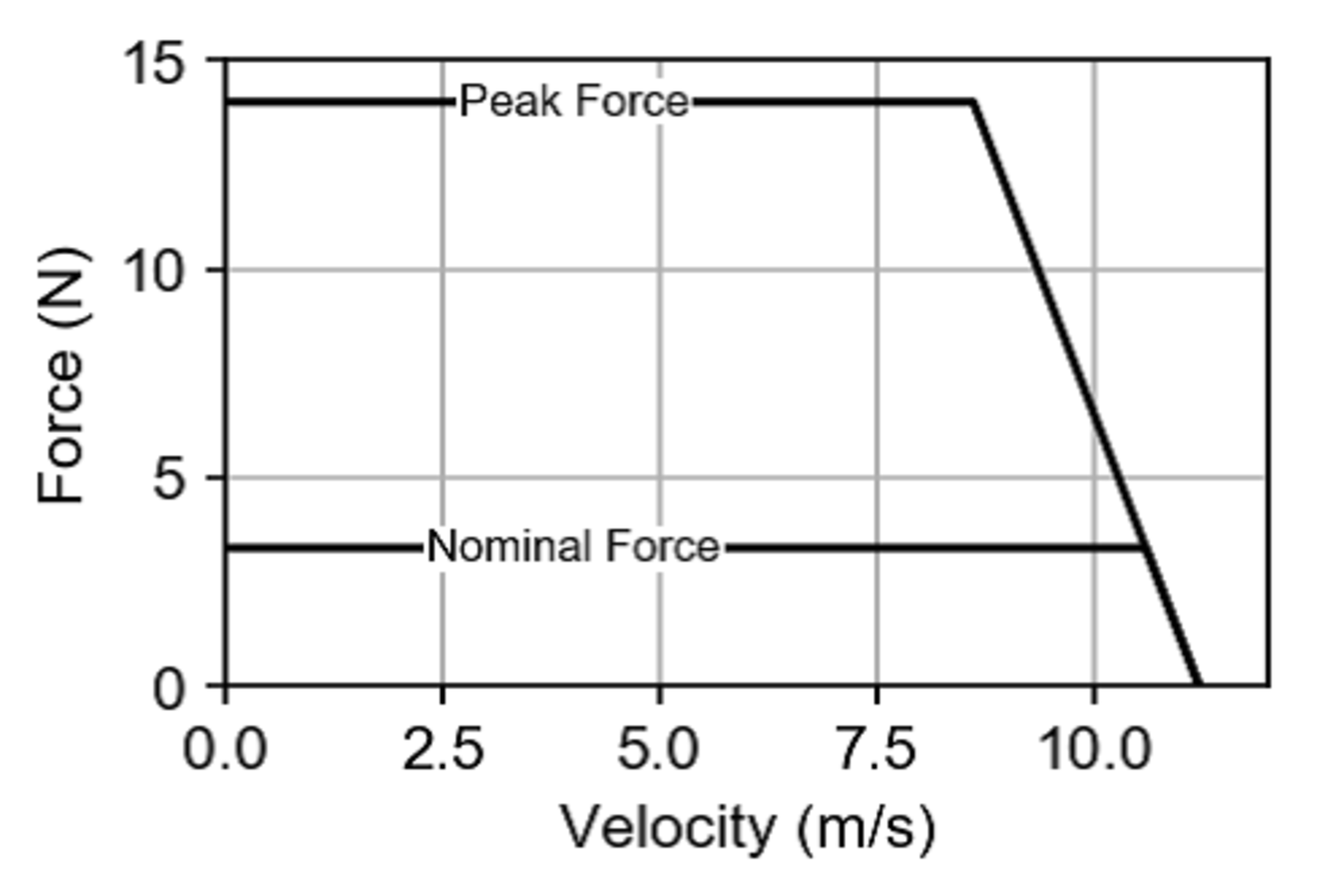
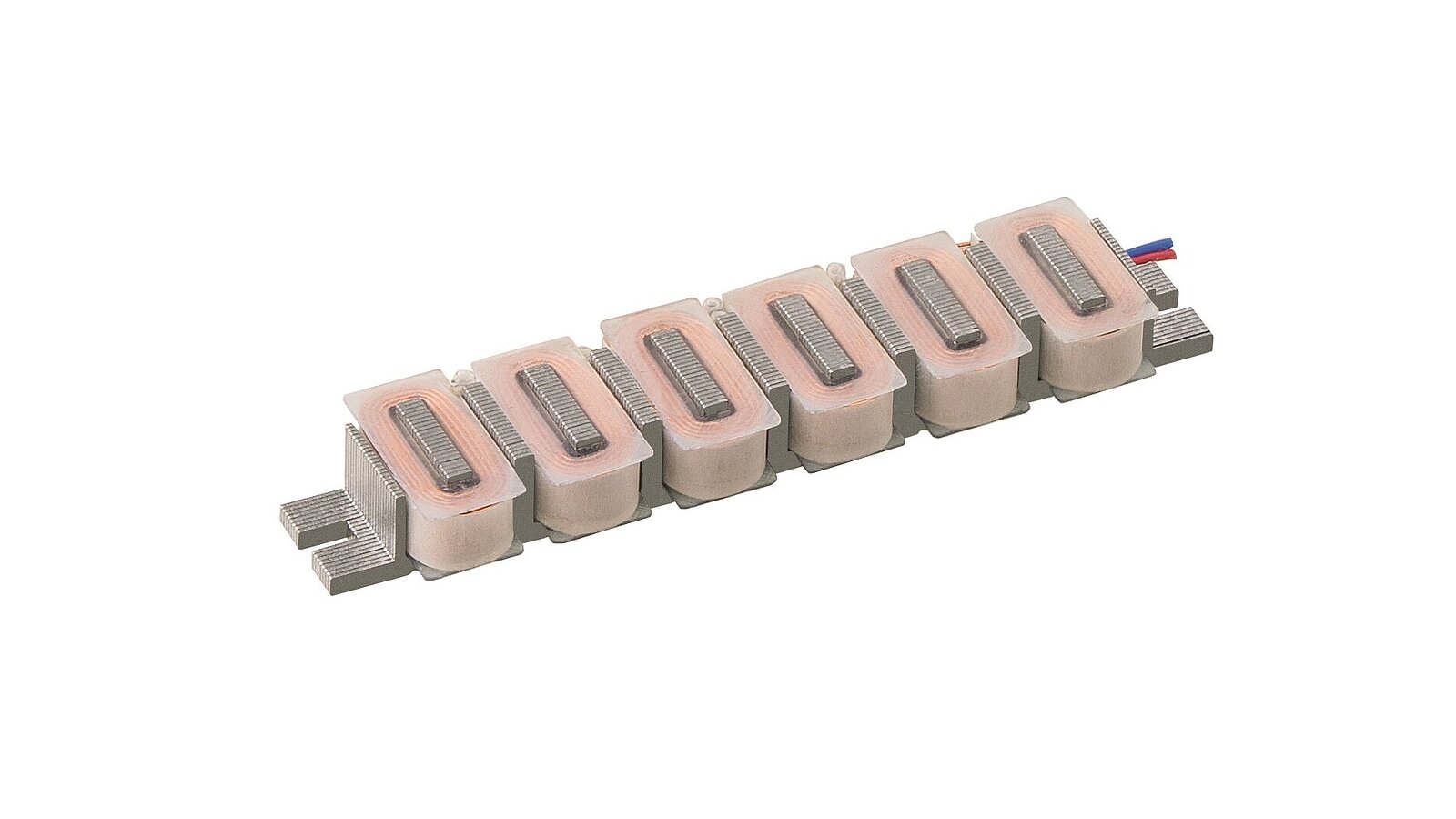


无铁芯线性电机的绕组体没有铁芯。这意味着线圈与磁性组件之间无吸引力,并且不会发生齿槽效应。没有铁芯还降低了电机本身的重量。由于没有影响导轨和进给速度的齿槽效应,并且绕组体更轻,因此无铁芯电机具有高行程精度、高速度稳定性和高加速度的特点。通过增加电机线圈的数量或尺寸可以满足功率和动态性要求。在大多数情况下,无铁芯电机可以比铁芯电机实现更低的公称力和峰值力。这是由于设计中缺少导热金属以及由此造成的线圈散热有限所致。因此,应借助于温度传感器保护电机免于过载。
无铁芯线性电机适用于在紧凑的安装空间中需要高动态性且对精度具有较高要求的应用。


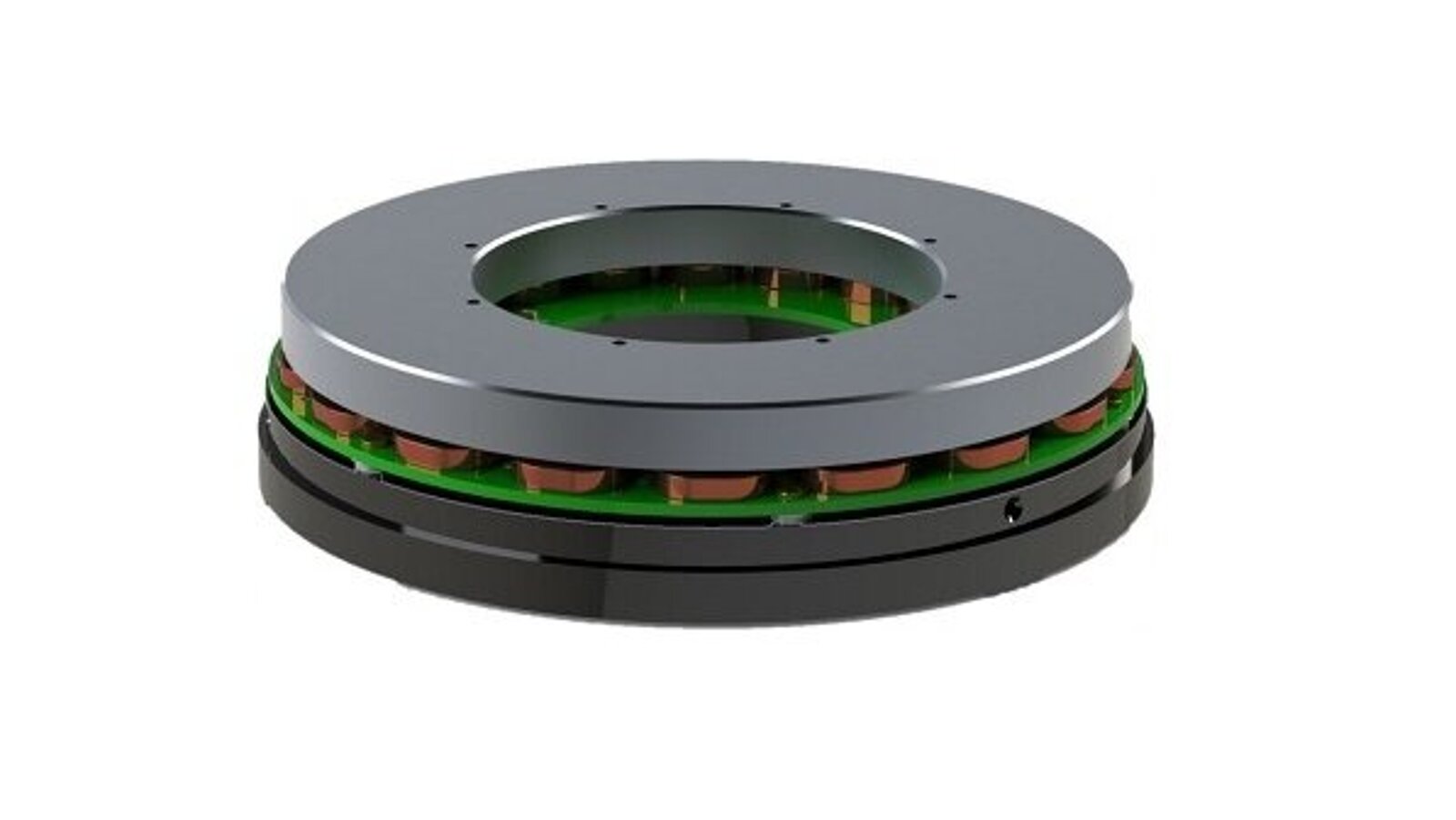
原则上,力矩电机是一种沿径向布置的线性电机。力矩电机的定子包含线圈且牢固安装;转子包含磁性组件。当磁体长度呈线性变化时,力矩变化量与直径成平方关系。因此,在大直径上会产生大力矩。此外,大的径向尺寸使得可以形成用于激光束或电缆通过的孔径。
由于直接驱动原理,力矩电机无空回。零游隙允许高定位精度和高传动刚性,因此可实现高重复精度。高驱动力矩可实现高加速度,因此具有高动态性。其他功能包括高抗扭刚度、高峰值力矩、高效率以及非常平稳的运转。
此外,得益于其在力矩和旋转对称性方面的紧凑型设计,力矩电机适用于单轴或多轴组件上的高负载转台。


位置、速度和力控制

由于磁性直接驱动器由电流控制,驱动力与电流呈线性相关,因此其操作不仅可以基于位置或速度控制,也可以基于力控制。
力控制允许以规定的保持力或进给力进行操作。可以在双控制回路中单独或同时读取力和位置传感器的值。除了纯力控制,还可选择次级的位置和速度调节。自动调零功能可定义在开环操作期间驱动器产生0牛顿力的保持电流。
重力补偿重力补偿

垂直安装的磁性直接驱动器必须保持运动平台和施加的负载不受重力影响。这可以通过重力补偿来实现。该方法适合于负载,即使无电机力,也可以将要移动的组件保持到位。这会使电机力专门用于定位任务。可以通过磁力、气动或机械方式补偿重力。PI根据所需的性能特性而采用不同的方法。














下载
PIMag®: Voice Coil, Linear, and Torque Motors Developed In-house
Individual design of magnetic direct drives for flexible, competitive, and application-specific positioning solutions
Rotating Electric Motors for Precision Positioning
An application-related comparison of different motor types