改进明日之翼项目的机翼外壳轮廓加工
铣削、去毛刺、密封和钻孔

改进明日之翼项目的机翼外壳轮廓加工
铣削、去毛刺、密封和钻孔
作为LuFo VI-1: ADMAS(先进加工和密封)研究项目的合作伙伴,PI于2024年6月在柏林国际航空展(ILA)上展示了一款全新定制设计的六足位移台。
作为空客公司领导的联合项目的一部分,PI开发了高性能6自由度六足位移台运动和定位系统(型号H-900K101),用于飞机制造中的高动态补偿运动学。 该项目的目标是在树脂传递模塑(RTM)制造工艺中提高碳纤维增强复合材料(CFRP)组件的加工和密封精度,同时缩短制造时间并降低工艺成本。
碳纤维复合材料刚度高、重量轻,有助于提高航空能效并减少CO2排放。
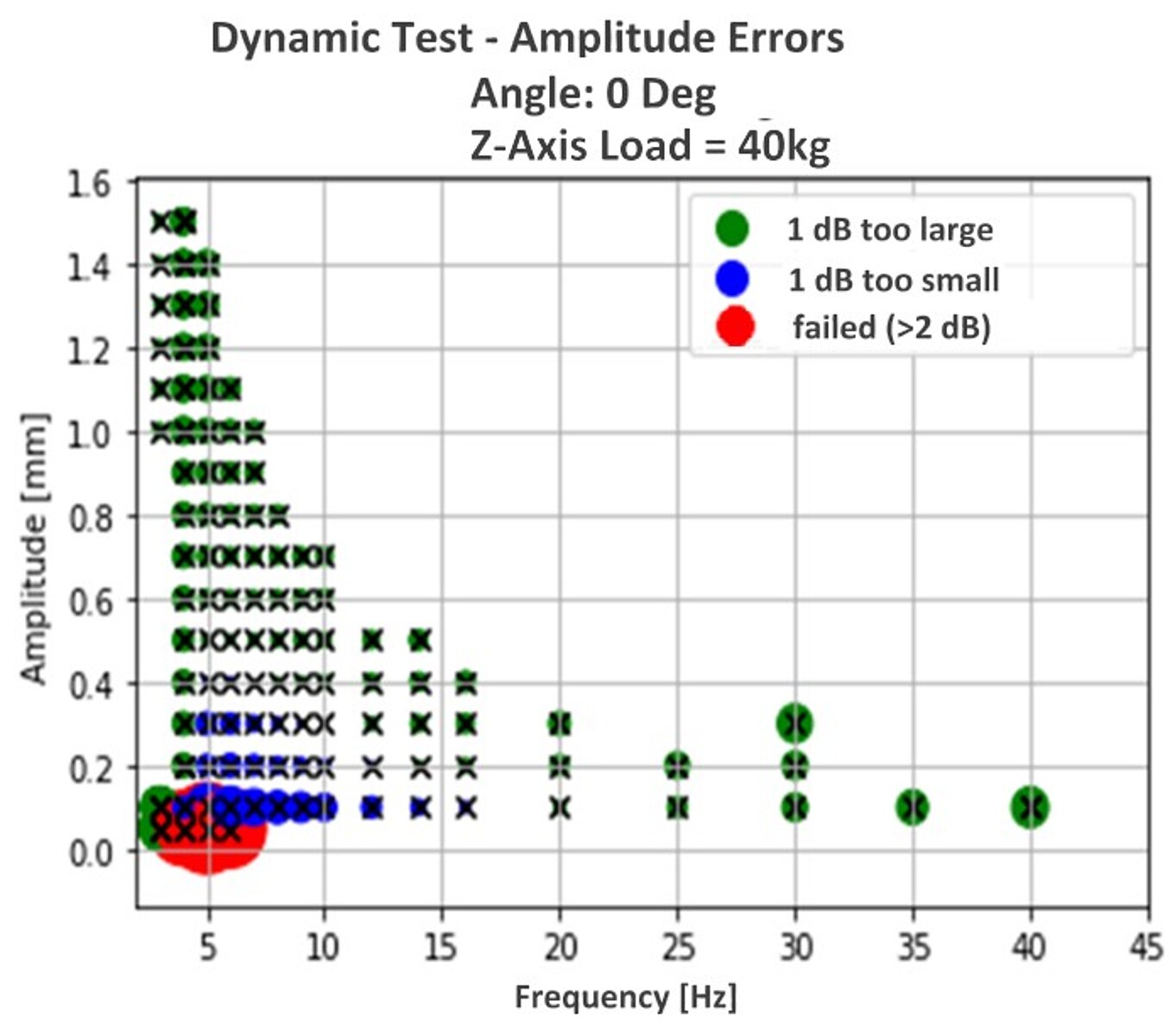
除了这种高动态性能外,六足位移台系统还提供了六足位移台控制器与驱动器电子器件之间的光纤数据传输功能。 与EtherCAT®接口和符合IP54防护等级的密封组件一起使用时,该系统还具有延迟时间极短的特点。 光纤数据传输使六足位移台控制器能够灵活地安装在加工单元外的控制柜中,而不会影响接口的多样性,同时还能控制距离长达100m (330ft)的驱动器电子器件。 在EtherCAT®接口方面,PI实现了EtherCAT®功能在控制器和驱动器架构中的深度集成。 因此,PI的定位系统在边缘检测传感器系统、关节机器人和六足位移台之间的复杂路径误差补偿回路中的死区时间极短。 六足位移台位置请求与位置响应之间的EtherCAT®控制回路响应时间仅为1.5ms。
状态监测
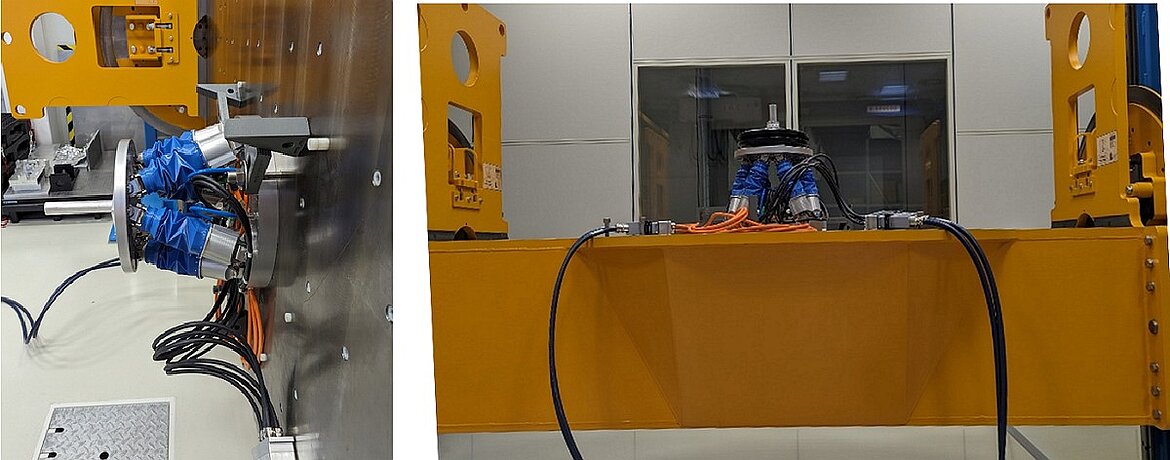
LuFo VI-1: ADMAS项目还研究了在状态监测背景下,如何使用加速度传感器检测单个六足位移台支撑腿的磨损情况。 单个支撑腿内的振动频谱可映射到驱动组件的特征本征频率,从而提供系统变化和维修需求的指标。
六足位移台: 并联运动学运动系统
与传统的串联运动学系统相比,六足位移台是一种并联运动学系统,可在更小的空间内实现六个自由度的运动。 在工业应用中,每个六足位移台支撑腿都配有绝对位置传感器,不仅提升了安全性,还免除了参考定位的需求。 所有坐标变换均在运动控制器上进行,用户友好型软件可执行复杂的运动曲线。 PI的精密六足位移台提供多种标准配置,负载能力从1kg到250kg不等,重复精度可达±0.06μm。 定制的精密六足位移台可以支持超过2000kg的负载。

该系统的行程范围从几毫米到几百毫米不等,精度可达纳米级,速度范围覆盖0.1mm/s至500mm/s。 PI六足位移台在全球范围内广泛应用于自动化、计量学、光子学与光学对准、汽车工业、医疗技术、天文学及科研等领域。 根据需求,它们可以针对实验室、洁净室、高真空和超高真空等环境进行定制。
在空客和IFAM的领导下,PI凭借四十年在六轴平台设计方面的经验,为这一创新性研究项目做出了重要贡献。 项目由德国联邦经济和气候保护部资助,并由DLR航空航天中心项目管理署监督,于2024年4月底成功完成。
德国斯塔德弗劳恩霍夫制造技术和应用材料研究所(IFAM)负责整体系统演示装置的建造,并承担项目中的研究课题以及各合作伙伴的任务,同时充分应用其宝贵的应用技术知识。
