用于规定和描述精密运动控制设备性能的术语在日常使用中经常会发生严重的误解。 遗憾的是,微定位硬件的用户和制造商经常使用的术语对不同的人来说具有不同含义。 为了避免起重机对仙鹤的情况(见图),在讨论微定位和纳米定位应用中的重复精度、精度、准确度等术语及相关概念时,建立一致的理解至关重要。
为了帮助澄清,随附的术语表定义了很常见的术语。 然而,其中一些术语需要在简要定义之外进行更详细的解释。
最容易被误解但又最关键的术语之一是精度或绝对精度。 该术语经常与其他术语混淆,例如准确度、分辨率、重复性或灵敏度。 简单来说,精度是指在给定输入下,实际位置与目标(或理想)位置之间的最大预期偏差。 要测量微定位或纳米定位设备的精度,外部激光干涉仪是理想工具。 某些激光干涉仪可以非常高精度地测量线性和角度位置。 自准直仪是另一种用于准确角度(误差)测量的光学工具。
误解这些术语的后果可能很严重。 例如,如果用户将分辨率误认为精度,他们可能会在实现预期结果时遭遇问题。 根据经验法则,要达到特定的精度水平,分辨率通常需要提高一个数量级,但这并不能保证达到预期水平。 即便使用高分辨率,也可能达不到高精度,例如当位置测量设备存在周期性误差或安装时未完全平行于运动路径时。
另一个常见的混淆点源于将规格表上的规格与实际使用情况中可实现的性能混为一谈。 通常,规格是针对“理想”条件提供的,例如环境温度为20°C、正常大气压、以特定速度进行单向运动以及最小负载。 遗憾的是,目前在实际应用中很少能够满足这些理想条件。 用户必须与制造商确认广告宣传的性能数据所适用的确切条件,并了解在预期应用的实际条件下这些数据可能会如何变化。
微定位/纳米定位术语表
- 绝对定位命令: 一种定位命令,其中所有移动均参考系统的零点。 例如,在线性定位系统中移动1的命令将使物体移动到x = 1的位置,无论物体在命令之前位于何处。
- 精度: 在给定输入下,实际位置与理想(期望)位置之间的最大预期差值。
- 对准系统: 一套旨在精确定位和调整组件或物体相对位置的工具和技术,确保在光学、光子学、机器人技术和制造等应用中实现精确对准。
- 自准直仪: 一种光学仪器,通过将光从镜面反射并检测与初始对准的偏差,以高精度测量微小的角度位移。
- 齿隙: 反向后不产生输出的输入部分;可能是传动系统组件之间啮合不良(即齿轮耦合传动系统中的齿轮齿)或轴向预载不足的结果。
- 基本轴承寿命: 额定负载下计算的最小轴承寿命。
- 双向重复精度: 从随机方向返回某一位置的能力;参见重复精度。
- 同心度: 旋转部件的实际中心线与平台实际旋转轴之间的变化量。
- 蠕变: 一种缓慢的、随时间变化的、非预期的运动或位置漂移,通常由内部材料变形、张力、热膨胀或润滑膜引起。
- 交叉耦合: 在多轴设备中,由于对某一轴的输入而导致另一轴的位置变化 - 例如,反射镜的倾斜角度随线性位移而变化。
- 动态误差补偿: 参见误差映射。 通过动态误差补偿,可在运动过程中实时校正误差,而不仅仅在每次运动结束时校正。
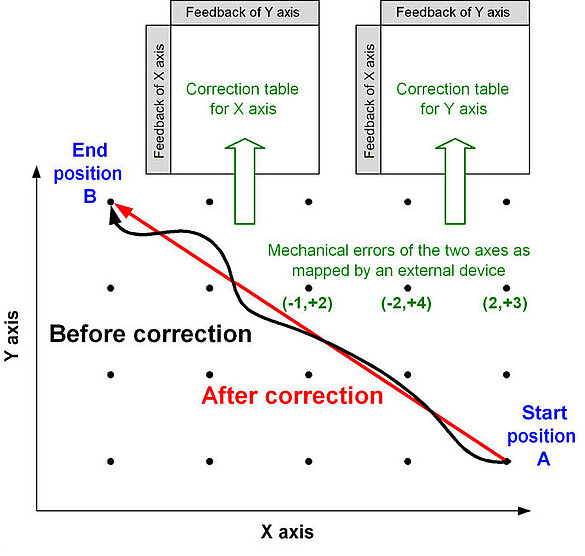
- 误差插补: 通过创建并上传至运动控制器的校正曲线,识别、记录和补偿运动系统中的系统误差,以提高定位精度的过程。 误差插补通常采用激光干涉仪等外部精密仪器来完成。
- 平面度: 给定平面表面上全部点与该表面理论平面的接近程度的度量。 常用于反射镜或光学元件。
- 行程平面度: 系统在运动过程中使其所有点保持在各自水平平面内的能力。
- 滞后: 物体沿一个方向运动后再反向返回时,其绝对位置存在的差异。 这是由于各种传动链组件(丝杠缠绕、联轴器、轴承等)中积累的弹性力造成的。 常与齿隙混淆。
- 增量运动指令: 参照受控对象当前位置的运动指令。 因此,如果物体位于x = 10,并给出移动+5的指令,物体将移动到x = 15(而不是像绝对系统那样移动到x = 5)。
- 输入整形: 一种先进技术,用于修改运动系统的输入指令,通过施加一系列预先计算的脉冲来抵消振荡,从而减少或消除振动。
- 导程: 丝杠每旋转一圈所移动的距离。
- 丝杠螺距: 在英制系统中,安装在丝杠上的物体移动一英寸所需的旋转圈数。 在公制系统中,螺纹之间的峰峰距离;参见导程。
- 基于学习的运动控制: 一种提高系统执行精确和自适应运动能力的方法,具体方式是利用机器学习算法,从过去经验和实时反馈中学习。
- 最小位移: 系统能够可重复产生的最小可控运动间隔。
- 正交性: 系统各轴之间保持90°关系的准确程度的度量。
- 螺距(倾斜): 在线性平台中,定位对象在纯水平平移过程中产生“上下”(倾斜)运动的非预期趋势。
- 准确度: 有时与精度同义使用,并(错误地)与重复精度同义使用。 在给定输入时,是指与理想位置的平均偏差。
- 重复精度: 系统将物体重复带到期望位置的能力(参见双向重复精度和准确度)。 根据所采用的测量标准,它可以是多次测试中的最差结果,或以标准偏差形式给出(1、2、3… sigma)。
- 分辨率: 常与最小位移混淆。 在闭环系统中,指传感器分辨率。 在齿轮传动系统中,它通常用于指定单步的计算理论尺寸(基于微步数或旋转编码器计数、齿轮减速比和传动丝杠螺距)。
- 刚度: 伺服电机或系统抵抗外部力或扭矩干扰的能力。
- 旋转: 在线性平台中,定位对象围绕其平移运动轴线旋转的非预期趋势。
- 跳动: 在线性平台中,除纯平移之外的任何非预期运动。 因此,跳动可能包括偏转、俯仰和旋转。
- 灵敏度: 能够产生输出运动的最小输入。
- 稳定性: 系统在给定环境中随时间推移保持定位精度的能力。 它是磨损、润滑剂(膜厚度可能导致误差)和温度的函数。
- 直线度: 系统沿完全直线路径移动物体的能力。 空气轴承可提供理想的直线度和平面度。
- 平移台: 一种精细机械装置,可实现物体沿一个或多个轴的受控线性运动,通常用于需要精确定位和对准的应用。
- 缠绕(扭转): 一种效应,即施加到丝杠驱动端的扭矩使该端的旋转角度大于输出端。
- 偏转: 在线性系统中,被定位物体相对于运动轴左右移动的不良倾向。
- 零齿隙齿轮箱: 一种旨在消除输入轴和输出轴之间间隙或损失运动的齿轮箱,可实现准确、平滑且高精度的扭矩传递,无延迟或位置误差。
多轴运动控制 – 附加复杂度
上述术语表中的大多数术语主要适用于单轴定位。 然而,许多应用需要多轴操作,这会涉及其他因素。 下文总结了多轴定位中一些最关键的术语和概念。 如前所定义,交叉耦合在多轴系统中尤为重要。
悬臂效应是多轴定位中的棘手难题之一。 当负载(特别是其重心)位于轴外时,就会产生这种效应。 在多轴定位器中,每个定位器的重心通常偏离另一个运动台的轴线,这可能导致挠曲或弯曲,并可能增大反向间隙。 为了尽量降低降低悬臂效应,最底层的定位器应具有最宽的基座(轴承之间的距离)。 为达到理想性能,建议使用真正的平面台(配有空气轴承),其中 X 轴和 Y 轴使用相同的基座

惯性是多轴系统中另一个关键考虑因素。 多轴设置中的最底层运动台支撑所有上层运动台以及样品,这意味着每个运动台都“承受”其上方整个系统的惯性。 这会影响系统在保持所需精度水平的同时加速和减速样品的能力。 并联运动可以显著降低惯性。 例如,在六足位移台六轴定位器中,只有一个公共平台由6个执行器支撑,全部执行器共享相同的惯性。
全局精度定义多轴定位系统中的精度,应当将其描述为混淆球。 它考虑了每个单独轴的累积误差(包括轴向和几何误差),形成一个三维公差范围,表示整个系统内指令位置与实际位置之间的最大偏差。 全局精度不局限于单一平面,而是存在于三维空间中,例如球体或立方体。
热材料匹配在多轴系统中变得越来越重要。 为达到理想性能,应选择热膨胀系数紧密匹配的材料,以尽量减少由于温度变化引起的变形。 将殷钢平台固定在铝制基座上可能会导致整体精度低于一开始就使用成本较低的铝制平台。
最后,固有频率是一个关键参数,用于消除或减少寄生机械振荡。 系统的谐振频率越高,其对外部干扰和系统输入的响应速度就越快。 现代控制算法,如输入整形和学习控制,有助于提高性能。
精密运动成功秘诀: 用户与供应商之间的紧密联系
微定位和纳米定位设备的用户应与设备制造商的工程师建立紧密联系,以确保对应用的具体要求和可用系统的能力有清晰、一致的理解。 通过与工程师直接合作,用户可以传达有关性能期望、环境条件以及可能影响设备性能的任何特别挑战(如温度波动或负载动态)的关键细节。 这种开放的沟通渠道使制造商能够提供有关如何优化或定制其系统以满足这些需求的见解,可能会建议专业配置、附加功能、定制调试,甚至进行修改以提高性能和精度。 这种合作关系不仅有助于使设备性能与应用需求保持一致,还能尽可能减少误解或预期落空的风险,最终实现更稳定、更准确且更有效的解决方案。
如果您在为下一个项目选择合适的微定位或纳米定位系统时需要支持,请直接联系PI团队成员。