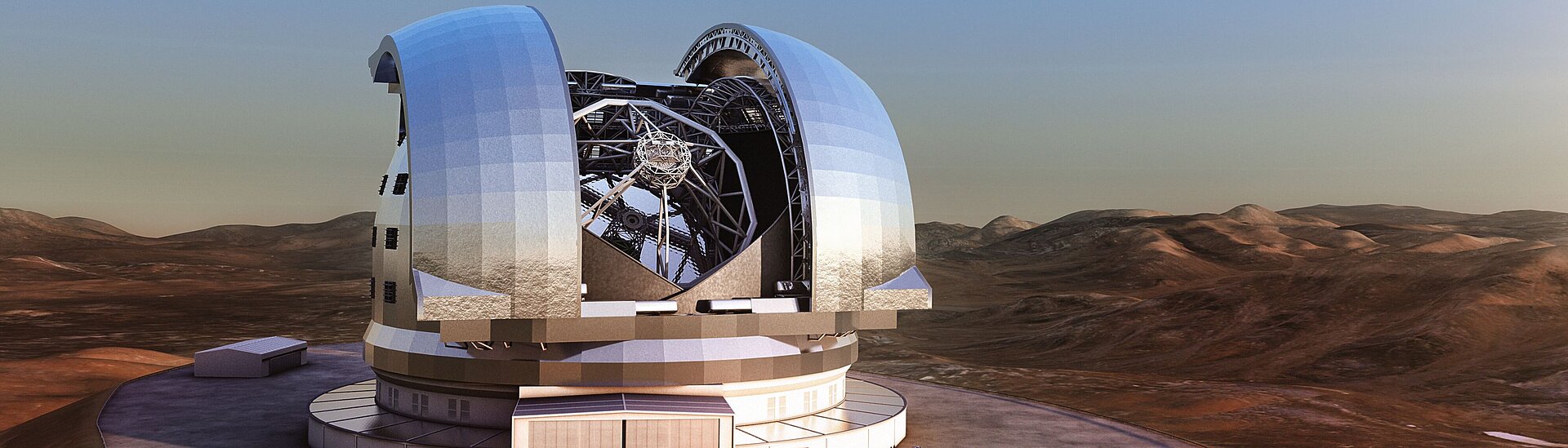
欧洲南方天文台(ESO)的欧洲极大望远镜(简称ELT)将配置一块直径39米、集光面积约1000平方米的拼接主反射镜。该望远镜是用于对可见光和近红外波长范围的电磁辐射进行科学研究的最大望远镜。其将于2024年在位于智利阿塔卡马沙漠的3046米高赛罗亚马逊山山顶投入使用,该望远镜最重要的任务之一是帮助我们更深入地了解外星行星,即太阳系以外的行星。
项目要求
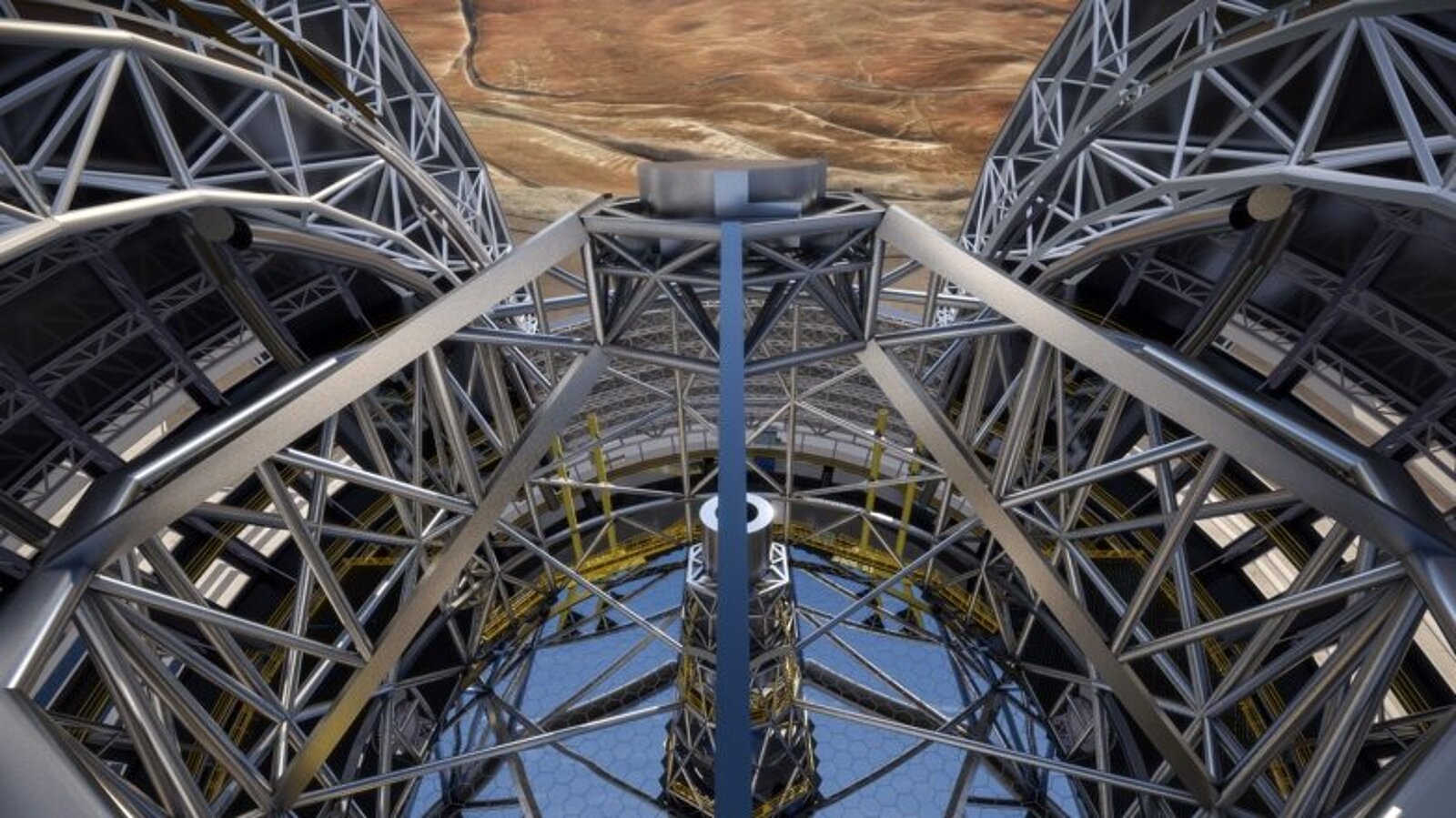
主反射镜由798块镜片组成,每个镜片的直径为1.40米。与人类肉眼相比,这些镜片总共可收集数以千万的光并能够将这些光通过光学器件进一步传递给科学仪器。为补偿最佳光路偏差从而避免产生成像误差,镜面单元之间必须精确地对齐。最佳光路偏差可能由望远镜筒变形等引起,导致望远镜筒变形的原因有重力、热效应或风压等因素。

每个镜片通过三个驱动器进行定位。项目要求达到了技术的极限:最大10毫米的相对较长行程,位置和路径精确度高于2纳米,这些都是在研发促动器时需要解决的难题。在观测期间追踪一个目标通常需要每秒几纳米到+/- 0.45微米/秒的移动速度。平均位置偏移量不能超过2纳米。如果望远镜对准的是一个不同目标,所需移动速度高达+/- 100微米/秒。而这需要移动相当大的重量:每个镜片重达250千克。
由于望远镜位置不同,每个单独的驱动器必须移动或承载介于463牛牵引力、1050牛推力之间的负载。风或地震会使这些负荷大大超出,但驱动器并不会处于激活运行状态。此外,对该系统在使用寿命上的极高要求意味着相当大的技术风险,这是在实施项目时需要考虑的,同样需要考虑的是促动器和控制器的最大允许废热。PI"针对"这一艰巨任务提供混合驱动器。
更多有关ESO和合同签订的信息,请点击>> 此处
镜片定位解决方案
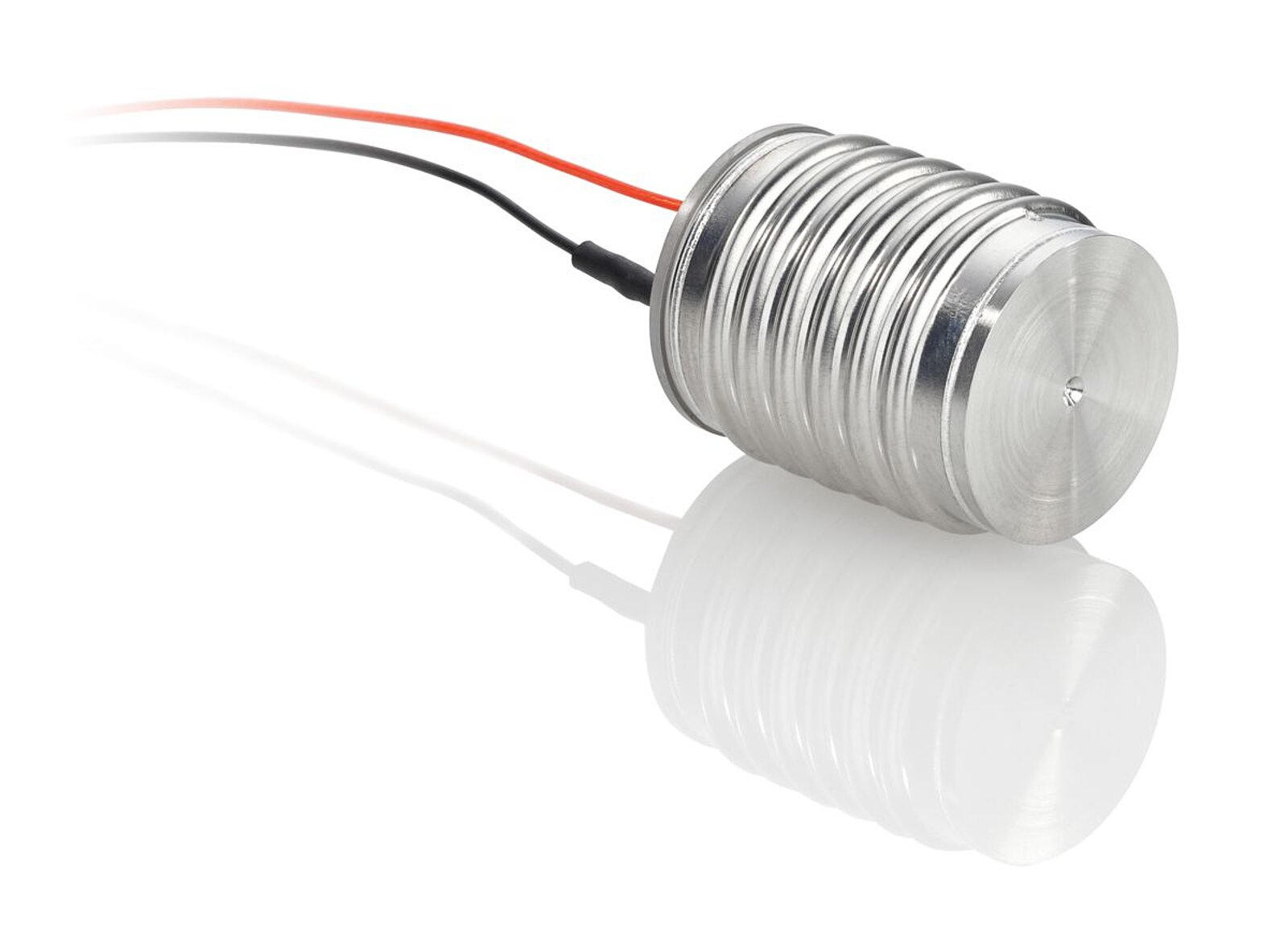
混合驱动原理将适合高负载和大行程的电机主轴驱动器与压电陶瓷促动器相结合。电机主轴驱动器的所有误差都能通过高分辨率传感器测得并可使用压电陶瓷促动器进行连接。从而确保了极高的定位精确度,而这是单纯的电机主轴驱动器所无法实现的。
专用控制器能够同时控制两个驱动器和高分辨率位置测量系统。伺服算法将电机和压电陶瓷系统视为单个驱动单元并将实际运动和计算轨迹进行比较。从而使ESO能精确地补偿主反射镜结构中产生的形变。主轴由一个大扭矩无刷电机通过高比率减速齿轮进行驱动。减速齿轮确保了零间隙运行和稳定的传动比。因此即使移动物的质量巨大,电机尺寸仍然可以很小。高传动比还支持静止状态下电机的自锁。
压电陶瓷促动器封装在一个充满氮气的封闭式金属波纹管中,因此,即使在不利的环境条件下,仍然能够避免湿气侵蚀并能够实现解决方案所要求的长达30年的使用寿命。高分辨率传感器是增量式光电编码器,安装在尽可能接近驱动器轴的位置。其运行分辨率为100皮米并且受环境条件变化的影响不大。
电控设计和控制器结构
驱动器电子器件包括两个功能块:电机换流电子器件、内插器件和限位开关位于驱动器机壳内,从而缩短了编码器线路,避免了信号干扰。通过单根电缆将驱动器与第二功能块和外部电子器件相连,实现对电机、压电陶瓷和编码器的控制。主控制器具有三个通道。这意味着只需要一个控制器就可以控制一个镜片的所有三个混合驱动器。同时,还可以为每一个单独的驱动器指定运动命令和理想的镜片位置。
控制器随后为其三个轴转化指令。混合驱动器的控制原理很容易理解:电机电压来自压电陶瓷的控制电压。电压越大,电机运转越快。当压电陶瓷伸长时,电机沿相同方向驱动主轴。通过这种方式,压电陶瓷精确定位将对主轴的粗调定位予以补充。同时,主轴总是自动地将压电陶瓷移动到靠近其零点的位置。这就使得主轴能够最大限度地在两个方向上修正位置。从而可以同时实现相对较大的行程和极高的定位精度。
混合驱动器的性能在ESO经过了大量的测试并得到了验证。这种灵活的控制器概念得到了广泛认同并简化了随后的改进工作。
下载
Hybrid Nanopositioning Systems with Piezo Actuators
Long Travel Ranges, Heavy Loads, and Exact Positioning
