传感器分辨率 (Sensor Resolution)
所采用测量系统可检测到的最小可计算增量。旋转编码器:每个螺丝旋转的计数。线性编码器:传感器系统能检测到的最小增量。传感器可为位置分辨率的决定性因素,因此可能需要单独指定传感器分辨率。
请参见 >>设计分辨率。
串联运动 (Serial Kinematics)
多轴运动系统的堆叠或嵌套装置。每个促动器均驱动其各自的平台。促动器和运动轴是彼此唯一指定的。因此,可以比较轻松地组装和控制多根轴相。动态特性取决于各个轴。与 >>并联运动相比,任何导向误差累积和整体导向精度都较差,请参见此处。
伺服电机 (Servo Motor)
带位置检测和控制的电机称为伺服电机。电机本身通常为直流电机。伺服电机在低速时提供高扭矩,在宽速度范围内提供良好的动态性能,并可以实现快速响应、低发热以及平稳无振动的运行。旋转编码器或绝对编码器均用于检测位置。伺服放大器负责放大信号并控制电机参数。这通常是带有附加滤波器的PID(比例、积分、微分)控制器,以便尽可能地利用上述特性。
请参见 >>无刷直流电机、 >>直流电机(DC)。
SpaceFAB设计 (SpaceFAB Design)
SpaceFAB为部分并联运动设置,具有恒定的支撑长度和特别带接装板或支架(作为选配件提供)的多轴系统装置低的轮廓。SpaceFAB中的每个XY线性平台布置驱动三个单独的支撑腿。机械布局允许非对称设置,例如,在所需运动方向上的较长行程。
规格 (Specifications)
在发货之前请检查性能规格。并非所有规格都可以组合。性能规格适用于室温(22 ±3摄氏度),并且在该温度下校准闭环操作中的系统(根据要求针对不同工作温度的规格)。在相当低或高的温度下运行时,可能需要重设操作参数。可根据要求定制超低温或超高温设计。
正齿轮 (Spur Gears)
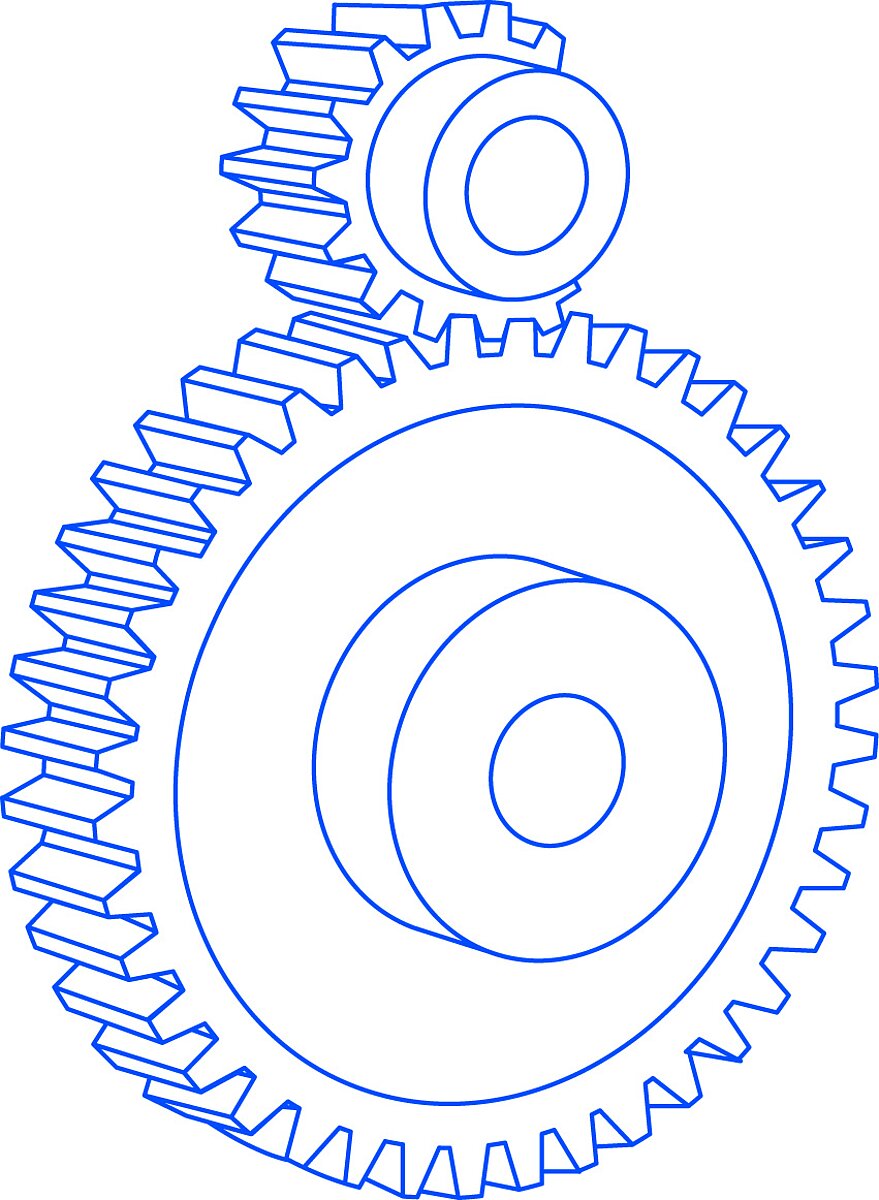
正齿轮由两个平行但尺寸不同的齿轮组成。由于设计简单,可以非常简单且稳健地制造正齿轮。由于其结构简单,正齿轮易于制造且坚固耐用。全金属型号满足均匀且平稳运行方面的高要求,尤其是对于需要在低扭矩下获得高精度的应用可实现无游隙型号。为实现此目标,通过齿轮系的反向扭转及其在电动机小齿轮上的张力来设置预载。除行星齿轮外,正齿轮通常也是PI线性平台中的标准选型齿轮电机。
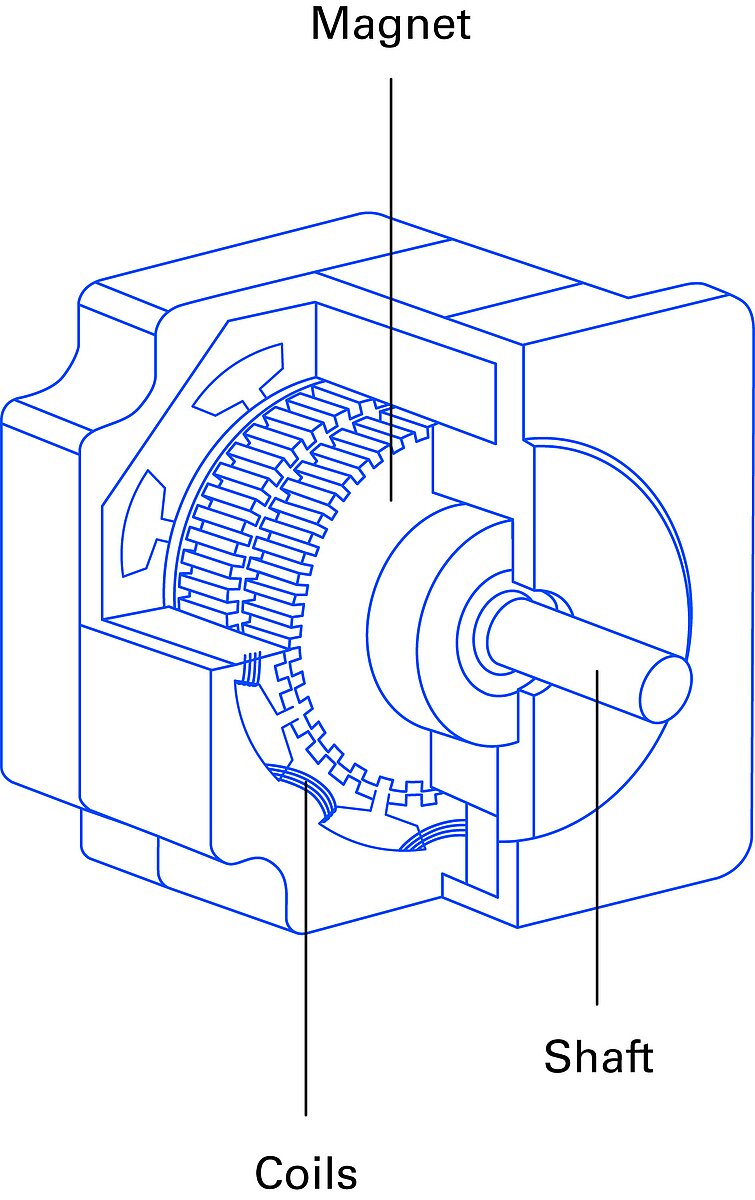
步进电机,两相步进电机(2SM) (Stepper Motor, 2-Phase Stepper Motor (2SM))
步进电机在每一转中仅占离散位置。得益于其量化步进,与直流电机相比,步进电机仅提供减小的动量。高速只能通过以扭矩为代价的大量步进来实现,因为绕组需要相互通电以便设置中间步进。
步进电机可以针对真空型应用进行搭建,具有较长的使用寿命,并且无需编码器即可应用于定位任务。步进电机的开环操作不会引起位置抖动,因为抖动是由闭环操作中的反馈环路引起的。通常,以旋钮形式应用机械式阻尼器以增强平稳运行并抑制共振。
步进电机拥有不同的配置。
刚度 (Stiffness)
弹簧常数,非线性压电材料。定位器的静态大信号刚度是针对数据表中室温下的定位方向指定的。例如,由于压电材料的活动特性或复合效应引起的影响,小信号刚度与动态刚度可能有所不同。
应变片传感器(SGS) (Strain Gauge Sensor (SGS))
应变片传感器包括封装在箔片(SGS)或半导体箔片(PRS)上的细金属线,其附着于压电陶瓷促动器或柔性铰链定位器的导向系统(控制杆、柔性铰链)。由于运动平台的位置取决于控制杆、导向或压电陶瓷堆叠的测量,因此这种类型的位置测量是通过接触和间接方式完成的。应变片传感器从其膨胀和由此产生的电阻变化中获得位置信息。每轴带有多个应变片传感器的全桥电路提高了热稳定性。