C-413.1G
PIMag运动控制器,单通道,台式设备,TCP/IP接口,力控制选项

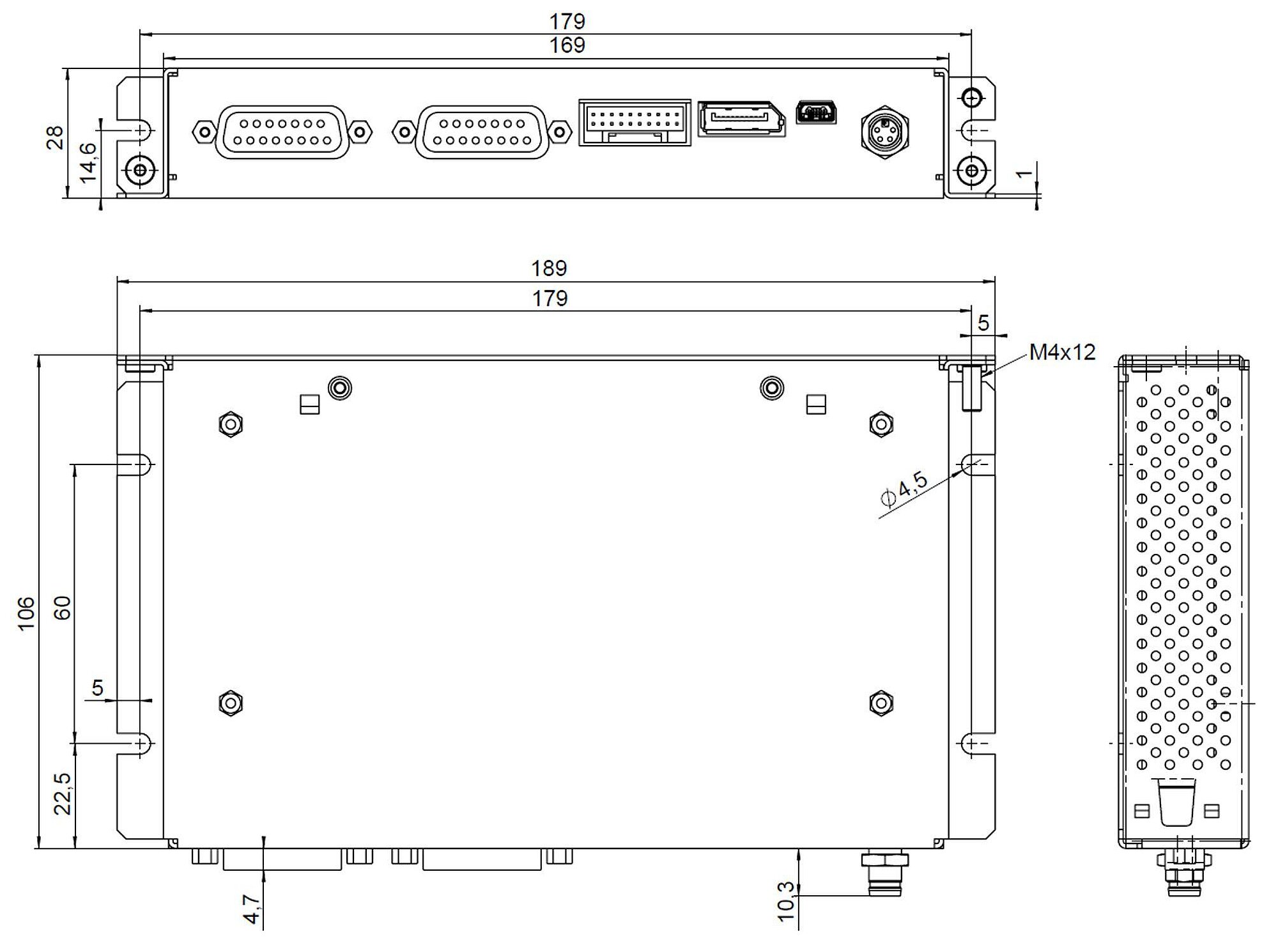
C-413.2G,C-413.2GA,尺寸单位为mm


用于PIMag音圈驱动器的数字运动控制器
C-413.1: 1个电机通道,2个传感器通道
C-413.2: 2个电机通道,4个传感器通道
用于力、位置和速度的PID控制器。 伺服更新率可在5至10kHz之间选择
力控制
力控制功能可实现利用规定的保持力或进给力对PIMag驱动器和定位器进行操作。 力和位置传感器的数值可同时读取及处理。 除了纯力控制,还可选择次级的位置调节和速度调节。 PI可提供配置力传感器的PIMag促动器。 C-413.2GA型号可通过模拟输入读取外部力传感器数据
机械部件保护
自动调零功能用于定义保持电流,在此电流下,驱动器输出一个0N的开环力,例如用于补偿重力。 I2t监控可防止驱动器因过流而过热
功能丰富
数据记录器:记录工作数据,如电机电流、速度、位置或位置误差。 波形发生器:保存和输出周期性运动曲线。 ID芯片支持:检测已连接的机械部件并简化配置和互换性。 支持方向感应参考点开关。 丰富的软件支持,例如适用于NI LabVIEW以及Windows和Linux动态库
接口
取决于型号,通过TCP/IP、USB2.0和SPI进行命令控制。 数字输入和输出实现自动化。 可选配模拟输入和输出,如用于传感器、发送命令或位置反馈
| 基础 | C-413.1G | C-413.2G | C-413.2GA | |
|---|---|---|---|---|
| 外壳类型 | 台式设备 | 台式设备 | 台式设备 | |
| 驱动类型 | 音圈 | 音圈 | 音圈 | |
| 轴 | 1 | 2 | 2 | |
| 与应用相关的功能 | 数据记录器 | 数据记录器 | 数据记录器 | |
| 驱动器功能 | 自动调零 ǀ 力控制模式下的表面探测 | 自动调零 ǀ 力控制模式下的表面探测 | 自动调零 ǀ 力控制模式下的表面探测 | |
| 保护功能 | 内部过热时停止电压输出 ǀ 出现错误时关闭伺服模式 ǀ 电机过热保护 | 内部过热时停止电压输出 ǀ 出现错误时关闭伺服模式 ǀ 电机过热保护 | 内部过热时停止电压输出 ǀ 出现错误时关闭伺服模式 ǀ 电机过热保护 | |
| 配置管理 | 读取ID芯片 ǀ 手动参数输入 | 读取ID芯片 ǀ 手动参数输入 | 读取ID芯片 ǀ 手动参数输入 | |
| 受支持的ID芯片 | ID芯片2.0 | ID芯片2.0 | ID芯片2.0 | |
| 运动和控制 | C-413.1G | C-413.2G | C-413.2GA | |
| 受支持的传感器信号 | SPI | SPI | SPI | |
| 控制变量 | 位置 ǀ 速度 ǀ 力 | 位置 ǀ 速度 ǀ 力 | 位置 ǀ 速度 ǀ 力 | |
| 最大控制频率(伺服周期) | 10000 Hz | 10000 Hz | 10000 Hz | |
| 运动类型 | 点对点运动 ǀ 带曲线生成器的点对点运动 ǀ 波形发生器 | 点对点运动 ǀ 带曲线生成器的点对点运动 ǀ 波形发生器 | 点对点运动 ǀ 带曲线生成器的点对点运动 ǀ 波形发生器 | |
| 参考点开关输入 | TTL | TTL | TTL | |
| 接口和操作 | C-413.1G | C-413.2G | C-413.2GA | |
| 通信接口 | TCP/IP | SPI ǀ USB 2.0 | SPI ǀ USB 2.0 | |
| 与运动相关的输入和输出 | 数字触发输入 ǀ 数字触发输出 ǀ 数字输出伺服周期 ǀ 模拟控制输出 ǀ 轴位置监控器模拟输出 ǀ 轴速度监控器模拟输出 ǀ 轴力监控器模拟输出 | 数字触发输入 ǀ 数字触发输出 ǀ 数字输出伺服周期 | 数字触发输入 ǀ 数字触发输出 ǀ 数字输出伺服周期 ǀ 模拟控制输入 ǀ 模拟传感器输入 ǀ 模拟控制输出 ǀ 轴位置监控器模拟输出 ǀ 轴速度监控器模拟输出 ǀ 轴力监控器模拟输出 | |
| 启/停开关 | 通过电源开/关 | 通过电源开/关 | 通过电源开/关 | |
| 显示器和指示灯 | 状态指示灯 ǀ 错误指示灯 | — | — | |
| 指令集 | GCS 2.0 | GCS 2.0 | GCS 2.0 | |
| 用户软件 | PIMikroMove | PIMikroMove | PIMikroMove | |
| 应用程序编程接口 | C、C++、C# ǀ MATLAB ǀ NI LabView ǀ Python | C、C++、C# ǀ MATLAB ǀ NI LabView ǀ Python | C、C++、C# ǀ MATLAB ǀ NI LabView ǀ Python | |
| 线性化 | 4阶多项式 | 4阶多项式 | 4阶多项式 | |
| 模拟输出 | 2 | — | 2 | |
| 模拟输出信号 | -10至+10V,1kHz | — | -10至+10V,1kHz | |
| 模拟输出的数字分辨率 | 17 bit | — | 17 bit | |
| 数字输入 | 4 | 4 | 4 | |
| 数字输入信号 | 符合EN 61131-2标准的3型输入,11V至30V,最大输入电流6mA | 5V TTL电平,最大输入电压24V,10kΩ输入电阻 | 5V TTL电平,最大输入电压24V,10kΩ输入电阻 | |
| 数字输出 | 6 | 6 | 6 | |
| 数字输出信号 | 24V驱动器输出(可驱动符合EN 61131-2标准的3型输入) | 开路集电极(范围5V至24V,33kΩ内部上拉至5V) | 开路集电极(范围5V至24V,33kΩ内部上拉至5V) | |
| 模拟输入 | — | — | 2 | |
| 模拟输入信号 | — | — | -10至+10V,1kHz | |
| 模拟输入的数字分辨率 | — | — | 16 bit | |
| 放大器 | C-413.1G | C-413.2G | C-413.2GA | |
| 传感器 | C-413.1G | C-413.2G | C-413.2GA | |
| 传感器通道 | 2 | 4 | 4 | |
| 电气性能 | C-413.1G | C-413.2G | C-413.2GA | |
| 输出电压 | 最大 24 V | 最大 24 V | 最大 24 V | |
| 峰值输出电流 | 1500 mA | 1500 mA | 1500 mA | |
| 其他 | C-413.1G | C-413.2G | C-413.2GA | |
| 电机/促动器连接器 | D-sub 9(母头) | D-sub 15(母头) | D-sub 15(母头) | |
| 传感器连接器 | D-sub 25(母头) | D-sub 15(母头) | D-sub 15(母头) | |
| 连接器模拟输出 | D-sub 15(母头) | — | PUD 面板插头 20针(公头) | |
| 连接器数字输入 | D-sub 15(母头) | PUD 面板插头 20针(公头) | PUD 面板插头 20针(公头) | |
| 连接器数字输出 | D-sub 15(母头) | PUD 面板插头 20针(公头) | PUD 面板插头 20针(公头) | |
| 连接器TCP/IP | RJ45插座,8P8C | — | — | |
| 电源电压连接器 | M8 4针(公头) | M8 4针(公头) | M8 4针(公头) | |
| 工作电压 | 24 V | 24 V | 24 V | |
| 电源适配器 | 含在发货范围内 ǀ 电源适配器24V DC | 含在发货范围内 ǀ 电源适配器24V DC | 含在发货范围内 ǀ 电源适配器24V DC | |
| 最大电流消耗 | 2 A | 2 A | 2 A | |
| 工作温度范围 | 5至50 °C | 5至50 °C | 5至50 °C | |
| 总质量 | 350 g | 300 g | 300 g | |
| 连接器USB | — | Mini-B USB插座 | Mini-B USB插座 | |
| 连接器SPI | — | 显示端口 | 显示端口 | |
| 连接器模拟输入 | — | — | PUD 面板插头 20针(公头) |
C-413.1G尺寸:210mm × 28mm × 105mm
C-413 PIMag®电机控制器
C-413 PIMag®控制器的SPI接口
C-413.1G PIMag®运动控制器
Implementing a C-887 PI Controller in TwinCAT 3.1
Updating PI Software with PIUpdateFinder
GCS阵列数据格式
PIMikroMove
PI GCS DLL
PI MATLAB驱动器GCS 2.0
PI GCS2 Driver Library for NI LabVIEW
PI Software on ARM-Based Platforms
Updating controller firmware with PIFirmwareManager
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。
PIMag运动控制器,单通道,台式设备,TCP/IP接口,力控制选项
PIMag运动控制器,双通道,台式设备,USB和SPI接口,力控制选项
PIMag运动控制器,双通道,台式设备,USB和SPI接口,模拟输入,力控制选项