水平安装时H-825.G2A上的最大负载
垂直安装时H-825.G2A上的最大负载
以最不利角度安装时H-825.G2A上的最大负载
水平安装时作用于H-825.G2A的最大允许力
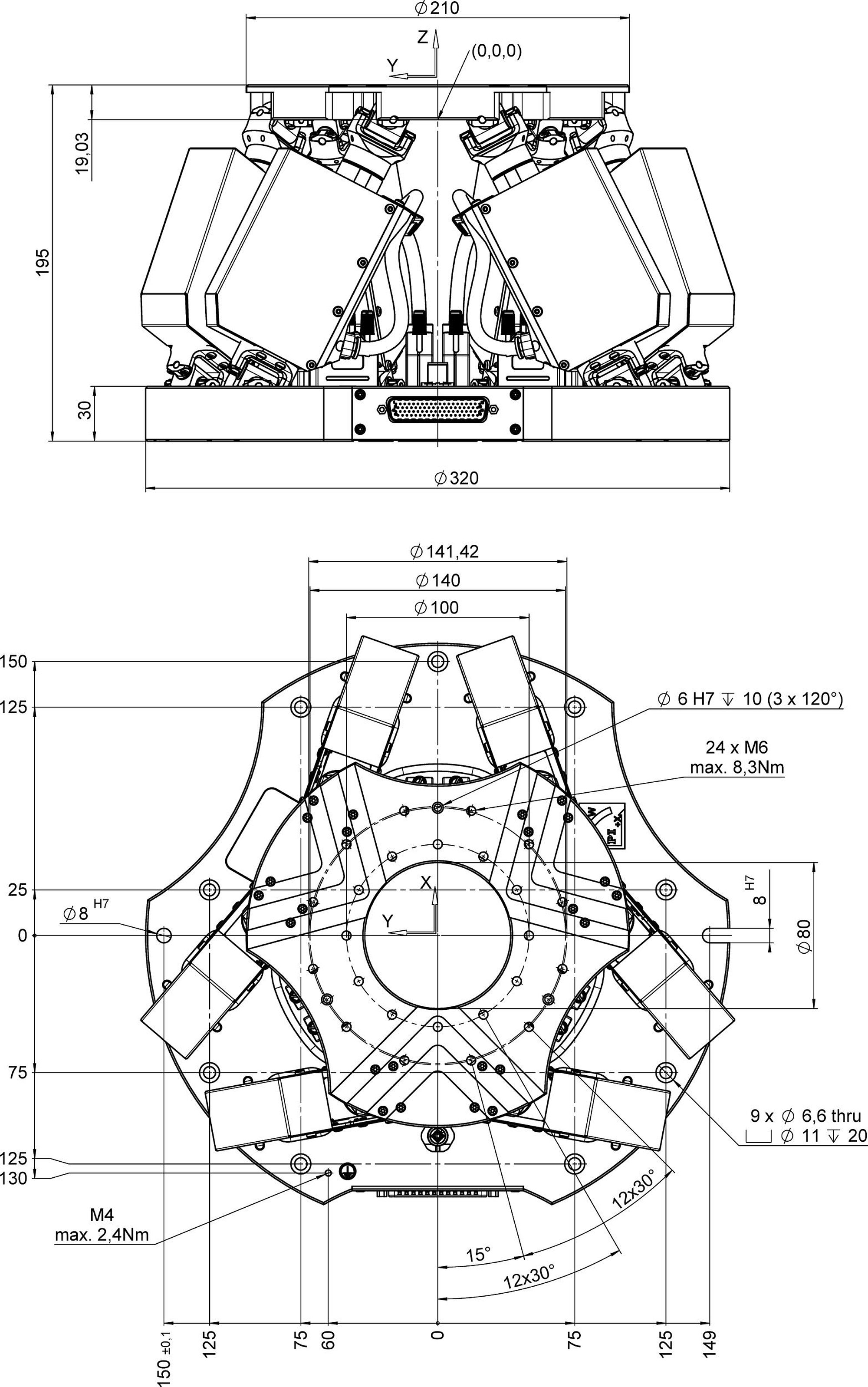
H-825,尺寸单位为毫米,位于标称行程零位
采用六自由度并联运动设计,相较于串联运动系统更加紧凑且更具刚性,无移动电缆。更稳定、摩擦更小。
BLDC电机
无刷直流电机尤其适合高旋转速度。 能够精确对其进行控制并确保高精度。 由于无滑动接触,可无磨损地平稳运行,因此能够实现较长的使用寿命。
绝对编码器
绝对编码器提供明确的位置信息,帮助即刻确定位置。 因此,接通时无需回零操作,有效提升运行效率和安全性。
PIVirtualMove
该仿真软件可模拟六足位移台的工作区和有效载荷的限值。 因此,在购买之前,您即可验证特定的六足位移台型号是否可以应对应用中出现的负载、力和力矩。 为此,该仿真工具综合考虑了六足位移台的位置和运动,以及枢轴点和多个参考坐标系。
应用领域
工业和科研。 用于微型装配、生物技术、半导体制造、光学对准。
铝
C-887.5x
连接电缆不包含在发货范围内,需单独订购。
可咨询定制版本。
测量定位的规格时,使用典型速度。数据以测量报告的形式包含在产品交付中,并存储在PI中。
各个坐标(X、Y、Z、θX、θY、θZ)的最大行程范围是相互依存的。当所有其他轴都处于标称行程范围的零位置并且使用默认坐标系时,或者更确切地说,当旋转中心点设置为0,0,0时,每个轴的数据显示其最大行程范围。
PI技术数据是在22±3°C环境温度下定义的。除非有特别说明,所有数值均基于无负载的情况。某些性能参数是相互关联的。“typ.”标识 是指属性的统计平均值,并非承诺每个交付产品均达到该数值。在产品交付前的最后检验中,我们只检测选定的属性,而不是全部属性。请注意,产品的某些特性可能会随着使用时间的增长而逐渐下降。
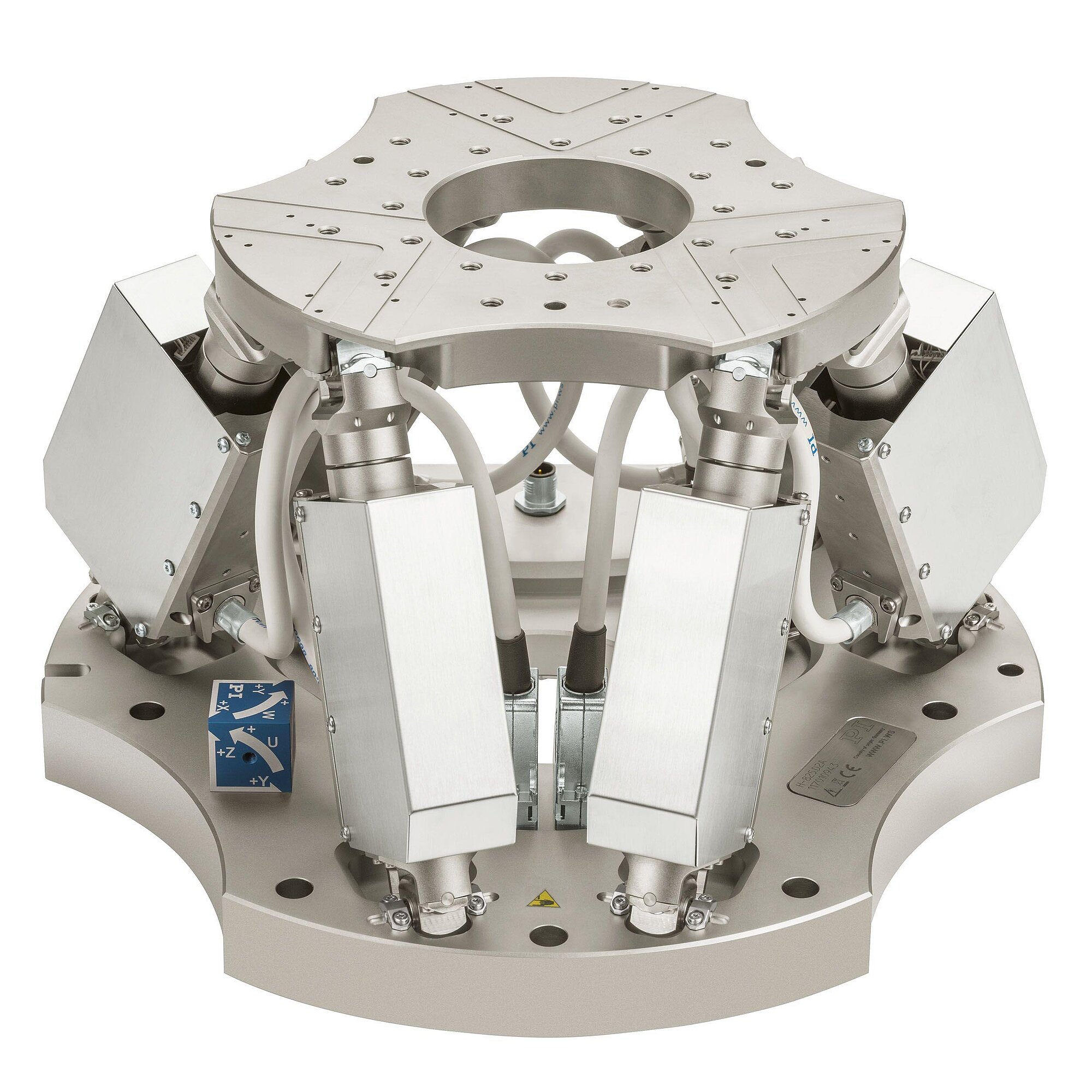
H-825紧凑型六足位移台微型机器人
六足位移台系统:带C-887.5x控制器的H-8x六足位移台
Technical note for unpacking the hexapod
就所需数量、价格和供货周期请求免费报价或描述您所需的改型。
紧凑型六足位移台;无刷直流齿轮电机;绝对编码器;有效载荷为30kg;最大速度为2.5mm/s。 连接电缆不包含在发货范围内,需单独订购。
通过电子邮件或电话从当地PI销售工程师处快速获取解答。
六足位移台平台适用于在所有六个自由度(即三根线性轴和三根旋转轴)实现负载的准确定位和校准。
PI提供可满足半导体制造中的掩模、晶圆和光学器件定位的最高要求的运动与控制解决方案
六足位移台的采用最大限度减少了运动机器人占用的空间,为线上自动化系统的样本检测工作赋予了卓越的灵活性。
光电元件、移动设备和优质腕表中的光学元件和玻璃纤维有哪些共同特性?